Матрица вращения для вращения вокруг оси x
Матрицы вращения используются для поворота вектора в новом направлении.
При преобразовании векторов в трёхмерном пространстве часто встречаются матрицы вращения. Матрицы вращения используются в двух смыслах: их можно использовать для поворота вектора в новое положение или их можно использовать для поворота базиса координат (или системы координат) в новое. В этом случае вектор остается один, но его компоненты в новом базисе будут отличаться от компонентов в исходном базисе. В евклидовом пространстве существует три основных вращения: по одному вокруг осей x, y и z. Каждый поворот определяется углом поворота. Угол поворота определяется как положительный для поворота против часовой стрелки, когда наблюдатель смотрит вдоль оси вращения в направлении начала координат. Любое произвольное вращение может быть составлено из комбинации этих трёх (теорема Эйлера о вращении). Например, можно повернуть вектор в любом направлении, используя последовательность из трёх поворотов: (α) v.
Матрицы вращения, которые поворачивают вектор вокруг осей x, y и z, задаются следующим образом:
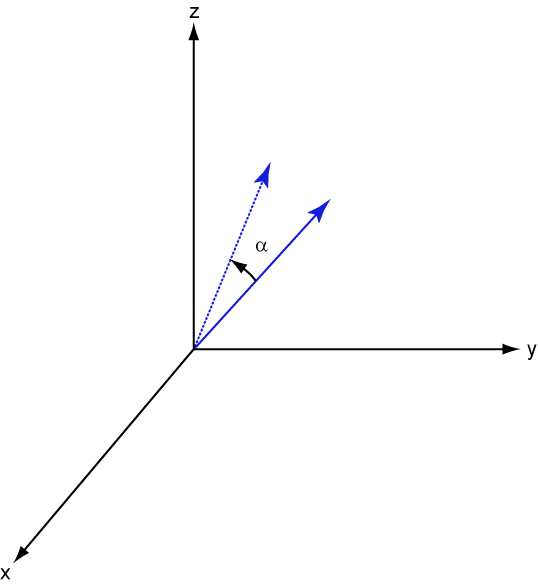
Вращение против часовой стрелки вокруг оси X
sinα0sinαcosα]
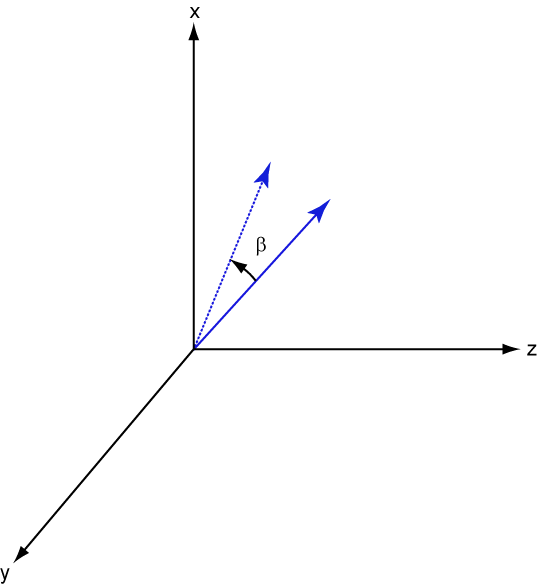
Вращение против часовой стрелки вокруг оси y
sinβ0cosβ]
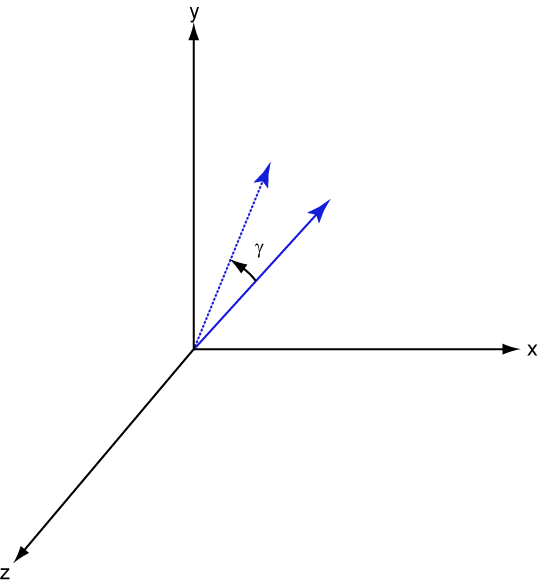
Вращение против часовой стрелки вокруг оси Z
sinγ 0sinγ cosγ 0001]
На следующих трех рисунках показано, как выглядят положительные повороты для каждой оси вращения:
Для любого вращения существует обратное вращение, удовлетворяющее = 1. Например, инверсия матрицы вращения по оси X получается изменением знака угла:
sinαcosα] = Rx ′ (α)
Этот пример иллюстрирует основное свойство: матрица обратного поворота является транспонированием оригинала. Матрицы вращения удовлетворяют A 'A = 1 и, следовательно, det (A) = 1. При вращениях сохраняются векторные длины, а также углы между векторами.
Мы можем думать о вращениях другим способом. Рассмотрим исходный набор базисных векторов, k, и поверните их все с помощью матрицы вращения A. Это дает новый набор базисных , ′ k ′, связанных с исходным:
С помощью транспонирования можно записать новые базисные векторы как линейные комбинации старых базисных векторов:
[ijk]
Теперь любой вектор может быть записан как линейная комбинация любого набора базисных векторов:
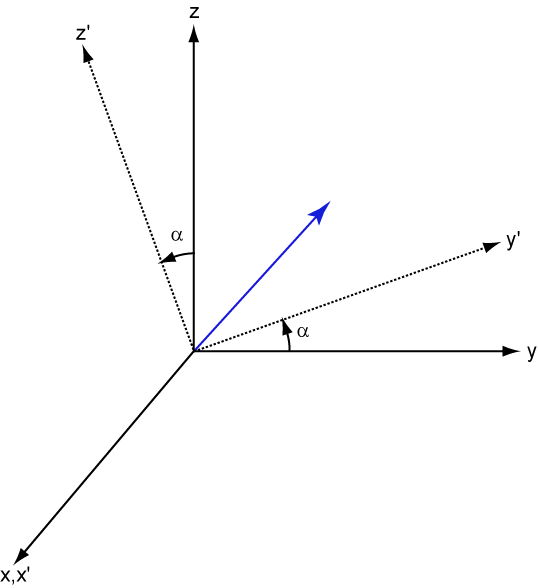
С помощью алгебраической манипуляции можно получить преобразование компонентов для фиксированного вектора при повороте базиса (или системы координат). Это преобразование использует транспонирование матрицы вращения.
vxvyvz]
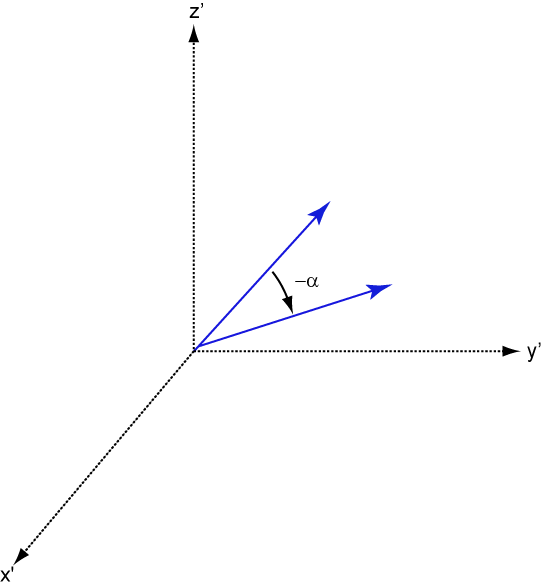
На следующем рисунке показано преобразование вектора при повороте системы координат вокруг оси X. На рисунке ниже показано, как это преобразование можно интерпретировать как вращение вектора в противоположном направлении.
[1] Голдштейн, Х., К. Пул и Дж. Сафко, Классическая механика, 3-е издание, Сан-Франциско: Эддисон Уэсли, 2002, стр. 142-144.
