Моделирование принятого сигнала в матрице датчиков
x = sensorsig(pos,ns,ang)pos представляет положения элементов массива, каждый из которых предполагается изотропным. ns указывает количество снимков моделируемого сигнала. ang представляет входящие направления каждого сигнала плоской волны. Предполагается, что сигналы плоских волн являются сигналами постоянного модуля со случайными фазами.
Смоделировать принятый сигнал в массиве и использовать данные для оценки направлений поступления.
Примечание.Этот пример выполняется только в R2016b или более поздних версиях. При использовании более ранней версии замените каждый вызов функции эквивалентным step синтаксис. Например, заменить myObject(x) с step(myObject,x).
Создайте 8-элементную однородную линейную матрицу, элементы которой разнесены на половину длины волны.
fc = 3e8; c = 3e8; lambda = c/fc; array = phased.ULA(8,lambda/2);
Смоделировать 100 снимков принятого сигнала в массиве. Предположим, что имеется два сигнала, поступающих от азимута 30 ° и 60 ° соответственно. Шум является белым для всех элементов матрицы, а SNR равен 10 дБ.
x = sensorsig(getElementPosition(array)/lambda,...
100,[30 60],db2pow(-10));Используйте блок оценки пространственного спектра диаграммы направленности для оценки направлений поступления на основе смоделированных данных.
estimator = phased.BeamscanEstimator('SensorArray',array,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'DOAOutputPort',true,'NumSignals',2); [~,ang_est] = estimator(x);
Постройте график пространственного спектра, полученного в результате процесса оценки.
plotSpectrum(estimator)

На графике показаны пики при 30 ° и 60 °.
Имитация приема двух некоррелированных входящих сигналов с различными уровнями мощности. Вектор с именем scov сохраняет уровни мощности.
Создайте 8-элементную однородную линейную матрицу, элементы которой разнесены на половину длины волны.
fc = 3e8; c = 3e8; lambda = c/fc; ha = phased.ULA(8,lambda/2);
Смоделировать 100 снимков принятого сигнала в массиве. Предположим, что один входящий сигнал исходит от 30 градусов азимута и имеет мощность 3 Вт. Второй входящий сигнал исходит от 60 градусов азимута и имеет мощность 1 Вт. Эти два сигнала не коррелируют друг с другом. Шум является белым для всех элементов матрицы, а SNR равен 10 дБ.
ang = [30 60];
scov = [3 1];
x = sensorsig(getElementPosition(ha)/lambda,...
100,ang,db2pow(-10),scov);Используйте блок оценки пространственного спектра диаграммы направленности для оценки направлений поступления на основе смоделированных данных.
hdoa = phased.BeamscanEstimator('SensorArray',ha,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'DOAOutputPort',true,'NumSignals',2); [~,ang_est] = step(hdoa,x);
Постройте график пространственного спектра, полученного в результате процесса оценки.
plotSpectrum(hdoa);

График показывает высокий пик при 30 градусах и нижний пик при 60 градусах.
Моделирование приема трех сигналов, два из которых коррелируются.
Создайте матрицу ковариации сигнала, в которой первый и третий из трех сигналов коррелируют друг с другом.
scov = [1 0 0.6;... 0 2 0;... 0.6 0 1];
Смоделировать прием 100 снимков трех входящих сигналов от азимута 30 °, 40 ° и 60 ° соответственно. Матрица, принимающая сигналы, представляет собой 8-элементную однородную линейную матрицу, элементы которой разнесены на половину длины волны. Шум является белым для всех элементов матрицы, а SNR равен 10 дБ.
pos = (0:7)*0.5; ns = 100; ang = [30 40 60]; ncov = db2pow(-10); x = sensorsig(pos,ns,ang,ncov,scov);
Имитация приема сигнала в URA. Сравните теоретическую ковариацию сигнала с ее выборкой ковариации.
Создайте однородную прямоугольную матрицу 2 на 2, имеющую элементы, разнесенные на 1/4 длины волны.
pos = 0.25 * [0 0 0 0; -1 1 -1 1; -1 -1 1 1];
Определите мощность шума независимо для каждого из четырех элементов массива. Каждая запись в ncov - мощность шума элемента матрицы. Эта позиция элемента является соответствующим столбцом в pos. Предположим, что шум не коррелирует между элементами.
ncov = db2pow([-9 -10 -10 -11]);
Смоделировать 100 снимков принятого сигнала в массиве и сохранить теоретическую и эмпирическую ковариационные матрицы. Предположим, что один входящий сигнал исходит от азимута 30 ° и отметки 10 °. Второй входящий сигнал исходит от азимута 50 ° и отметки 0 °. Сигналы имеют мощность 1 Вт и не коррелируются.
ns = 100;
ang1 = [30; 10];
ang2 = [50; 0];
ang = [ang1, ang2];
rng default
[x,rt,r] = sensorsig(pos,ns,ang,ncov);Просмотрите величины теоретической ковариации и ковариации образца.
abs(rt)
ans = 4×4
2.1259 1.8181 1.9261 1.9754
1.8181 2.1000 1.5263 1.9261
1.9261 1.5263 2.1000 1.8181
1.9754 1.9261 1.8181 2.0794
abs(r)
ans = 4×4
2.2107 1.7961 2.0205 1.9813
1.7961 1.9858 1.5163 1.8384
2.0205 1.5163 2.1762 1.8072
1.9813 1.8384 1.8072 2.0000
Имитация приема сигнала в ULA, где шум между различными датчиками коррелирован.
Создайте 4-элементную однородную линейную матрицу, элементы которой разнесены на половину длины волны.
pos = 0.5 * (0:3);
Определите матрицу ковариации шума. Значение в позиции (k,_j_) в ncov матрица - ковариация между k и j элементами массива, перечисленными в массиве.
ncov = 0.1 * [1 0.1 0 0; 0.1 1 0.1 0; 0 0.1 1 0.1; 0 0 0.1 1];
Смоделировать 100 снимков принятого сигнала в массиве. Предположим, что один входящий сигнал исходит от азимута 60 °.
ns = 100; ang = 60; [x,rt,r] = sensorsig(pos,ns,ang,ncov);
Просмотрите теоретическую и выборочную ковариационные матрицы для принятого сигнала.
rt,r
rt = 4×4 complex
1.1000 + 0.0000i -0.9027 - 0.4086i 0.6661 + 0.7458i -0.3033 - 0.9529i
-0.9027 + 0.4086i 1.1000 + 0.0000i -0.9027 - 0.4086i 0.6661 + 0.7458i
0.6661 - 0.7458i -0.9027 + 0.4086i 1.1000 + 0.0000i -0.9027 - 0.4086i
-0.3033 + 0.9529i 0.6661 - 0.7458i -0.9027 + 0.4086i 1.1000 + 0.0000i
r = 4×4 complex
1.1059 + 0.0000i -0.8681 - 0.4116i 0.6550 + 0.7017i -0.3151 - 0.9363i
-0.8681 + 0.4116i 1.0037 + 0.0000i -0.8458 - 0.3456i 0.6578 + 0.6750i
0.6550 - 0.7017i -0.8458 + 0.3456i 1.0260 + 0.0000i -0.8775 - 0.3753i
-0.3151 + 0.9363i 0.6578 - 0.6750i -0.8775 + 0.3753i 1.0606 + 0.0000i
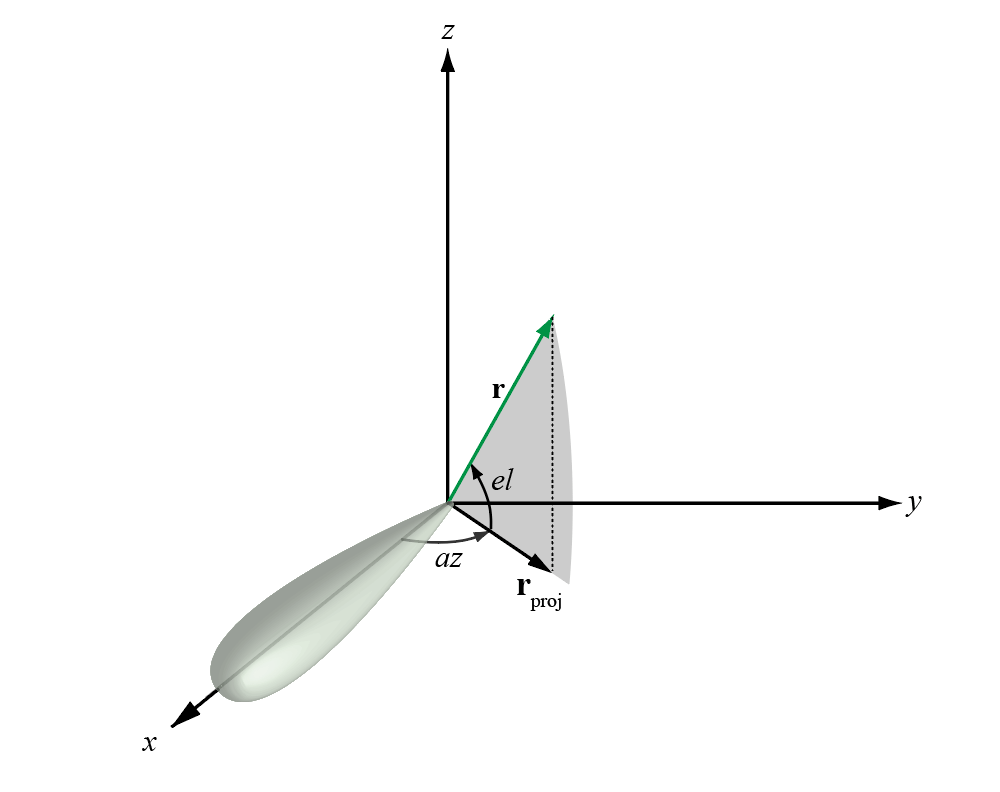
Азимутальный угол вектора - это угол между осью x и ортогональной проекцией вектора на плоскость xy. Угол положителен в направлении от оси x к оси y. Азимутальные углы лежат между -180 и 180 градусами. Угол места - это угол между вектором и его ортогональной проекцией на плоскость xy. При переходе к положительной оси Z от плоскости xy угол является положительным. По умолчанию направление визирования элемента или массива выравнивается по положительной оси X. Направление визирования - это направление главного лепестка элемента или массива.
Примечание
Иногда угол возвышения определяется в литературе как угол вектора с положительной осью z. В продуктах MATLAB ® и Phased Array System Toolbox™ это определение не используется.
Этот рисунок иллюстрирует азимутальный угол и угол возвышения для вектора, показанного зеленой сплошной линией.