Линейный привод с силовыми характеристиками биологической мышцы
Simscape/Жидкости/Газ/Исполнительные механизмы
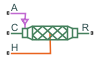
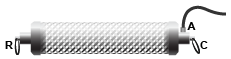
Блок привода воздушных мышц (G) моделирует линейный привод, популярный в робототехнике по своим характеристикам, напоминающим биологические мышцы. Исполнительный механизм содержит расширяемый баллон в плетеной оболочке. Когда мочевой пузырь находится под давлением, пара расширяется и одновременно укорачивается, создавая на их концах сократительную силу. Камера находится под давлением в газовом канале А; усилие прикладывается к механическим поступательным портам R и C.
Воздушная мышца в расслабленном состоянии
Воздушные мышцы часто устанавливаются парами - одна мышца служит агонистом, другая - антагонистом. Пары такого рода распространены в организме человека, где бицепсы (в руке) сопровождают трицепсы, а квадрицепсы (в ноге) сопровождают подколенные сухожилия. Мышцы прикрепляются на одном конце к суставу, но со смещением, чтобы создать крутящий момент. Когда чистый крутящий момент отличается от нуля и если условия загрузки позволяют, соединение поворачивается.
Весы массы и энергии привода такие, как описано для блока поступательного механического преобразователя (G). Сила привода, однако, основана на стандартном уравнении Чоу - Ханнафорда (с двумя коррекциями, выполненными для упрощающих допущений исходной модели). В первоначальном виде уравнение Чоу - Ханнафорда даёт:
2 − 1],
где:
F - сжимающее усилие, прилагаемое приводом к его концам. Нижний индекс C-H обозначает теоретическое значение исходной модели Чоу-Ханнафорда.
D - диаметр баллона и корпуса в сборе. Нижний индекс M обозначает его максимальное теоретическое значение - то, в котором косы оболочки находятся под прямыми углами к её продольной оси.
P - манометрическое давление в камере (измеренное по отношению к окружающей среде, внешней по отношению к приводу).
L - длина привода (расстояние между механическими портами R и C.
l - естественная длина оплетки (до ее растяжения в сосуде под давлением). Косы, поскольку они намотаны вокруг продольной оси исполнительного механизма, всегда длиннее, чем сам исполнительный механизм).
Максимальный теоретический диаметр привода определяется как:
lnδ,
где n - число витков, которые оплетка делает вокруг продольной оси исполнительного механизма.
В уравнении Чоу-Ханнафорда подразумеваются допущения бесконечно тонкого мочевого пузыря и оболочки и неэластичных кос, неспособных растягиваться. Оба предположения могут снизить точность модели и быть скорректированы в этом блоке. Поправка на растяжение в оплетке заменяет постоянную длину l переменной длиной l *:
C + 1) + 2nPD2Ed,
где l - естественная длина оплетки, используемой в исходном уравнении Чоу-Ханнафорда, и:
C является поправочным термином для растяжения оплетки.
E - модуль упругости Юнга для материала косы.
d - диаметр пряди в оплетке (каждая оплетка представляет собой пучок плотно переплетенных прядей).
Поправочный термин для растяжения оплетки определяется как:
n2security2Ed2NPlL,
где N - общее число прядей в плетеной оболочке. Поправка на толщину мочевого пузыря и оболочки добавляет к общей силе привода коэффициент:
DM2D) − t2]
где t - совокупная толщина мочевого пузыря и оболочки и нижний индекс T обозначает поправку для толщины. Общая сила привода:
FT,
где длина нити, используемая при вычислении члена Чоу-Ханнафорда, является переменной l *. Эта сила противодействует в пределах растяжения и сжатия поступательными жесткими упорами. Они смоделированы, как описано для блока поступательного жесткого останова.
Сопротивление потоку между входом газа (порт А) и внутренней частью привода отсутствует.
Тепловое сопротивление между стенкой привода (порт H) и газом, который он окружает, отсутствует.
Исполнительный механизм герметичен и не протекает.
Эффекты трения и инерции игнорируются.
Мочевой пузырь и оболочка совершенно цилиндрические независимо от их уровня накачки.
Продольная эластичность мочевого пузыря игнорируется.
Вентилятор (G) | Жесткая остановка трансляций | Трансляционный механический преобразователь (G)

