Двунаправленный жидкостный электродвигатель переменного перемещения
Simscape/Жидкости/Термическая жидкость/Насосы и двигатели

Блок двигателя с переменным смещением представляет собой устройство, которое извлекает энергию из тепловой жидкостной сети и подает ее в механическую вращательную сеть. Смещение двигателя изменяется во время моделирования в соответствии с входным физическим сигналом, указанным в порту D.
Порты A и B представляют входы двигателя. Порты R и C представляют вал привода двигателя и корпус. Во время нормальной работы падение давления от отверстия А к отверстию В вызывает положительный расход от отверстия А к отверстию В и положительное вращение вала двигателя относительно корпуса двигателя. Этот режим работы здесь называется двигателем переднего хода.
Режимы работы
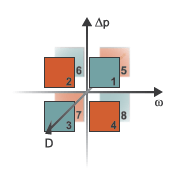
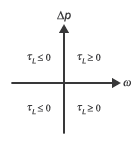
Блок имеет восемь режимов работы. Рабочий режим зависит от усиления давления от порта A к порту B, Δp = pB - pA; угловая скорость, λ = λ R - λ C; и объемное смещение жидкости в порту D. На приведенном выше рисунке показаны эти режимы в соответствии с октантами диаграммы Δp-λ-D:
Режим 1, прямой двигатель: поток от порта A к порту B вызывает снижение давления от A до B и положительную угловую скорость вала.
Режим 2, обратный насос: отрицательная угловая скорость вала вызывает увеличение давления от порта B к порту A и потока от B к порту A.
Режим 3, обратный двигатель: поток от порта B к порту A вызывает снижение давления от B к A и отрицательную угловую скорость вала.
Режим 4, прямой насос: Положительная угловая скорость вала вызывает увеличение давления от порта A к порту B и потока от A к B.
Режим 5, обратный насос: положительная угловая скорость вала вызывает увеличение давления от порта B к порту A и потока от B к A.
Режим 6, прямой двигатель: поток от порта A к порту B вызывает снижение давления от A до B и положительную угловую скорость вала.
Режим 7, Насос прямого действия: Отрицательная угловая скорость вала вызывает увеличение давления от порта A к порту B и потока от A к B.
Режим 8, обратный двигатель: поток от B к A вызывает снижение давления от B к A и положительную угловую скорость вала.
Время срабатывания двигателя считается ничтожно малым по сравнению со временем срабатывания системы. Предполагается, что двигатель достигает установившегося состояния почти мгновенно и рассматривается как квазиустановившаяся составляющая.
Модель двигателя учитывает потери мощности из-за утечки и трения. Утечка является внутренней и происходит только между входом и выходом двигателя. Блок вычисляет скорость потока утечки и крутящий момент трения, используя пять параметров потерь. Параметризация выбирается с помощью вариантов блоков и, в Analytical or tabulated data случай, параметр параметризации трения и утечки.
Параметризации потерь
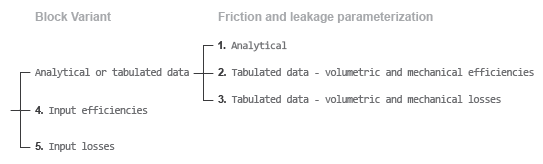
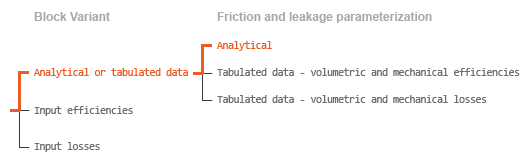
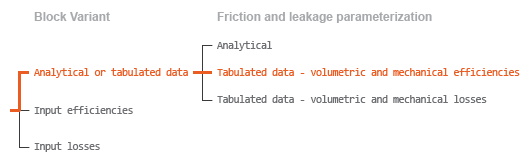
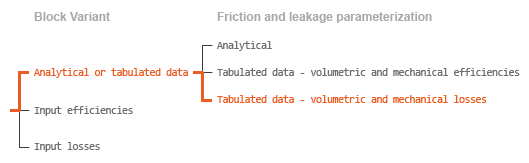
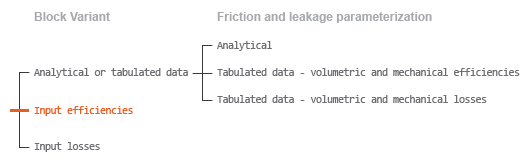
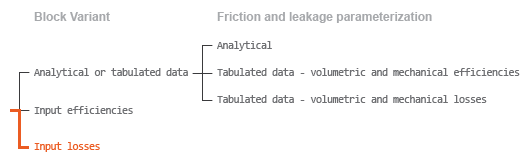
Блок предоставляет три варианта Simulink ® для выбора из. Чтобы изменить активный вариант блока, щелкните его правой кнопкой мыши и выберите «Simscape» > «Варианты блока». Доступны следующие варианты:
Analytical or tabulated data - Получение механической и объемной эффективности или потерь из аналитических моделей на основе номинальных параметров или на основе табулированных данных. Используйте параметр параметризации трения и утечки, чтобы выбрать точный тип ввода.
Input efficiencies - Обеспечивает механическую и объемную эффективность непосредственно через порты ввода физических сигналов.
Input losses - Обеспечивают механические и объемные потери непосредственно через порты ввода физического сигнала. Механические потери определяются как момент внутреннего трения. Объемные потери определяются как внутренний расход утечки.
Массовый расход, генерируемый двигателем, составляет
где:
- фактический массовый расход.
- идеальный массовый расход.
- внутренний расход жидкости для утечки.
Крутящий момент, создаваемый двигателем, составляет
Трение»,
где:
start- фактический крутящий момент.
theИдеальный - идеальный крутящий момент.
«Трение» - это крутящий момент трения.
Идеальным массовым расходом является
и идеальным генерируемым крутящим моментом является
DSatΔp,
где:
start- средняя плотность жидкости в тепловых жидкостных портах A и B.
DSat - это сглаженное смещение, вычисленное так, чтобы удалить численные разрывы между отрицательным и положительным смещениями.
λ - угловая скорость вала.
Δp - перепад давления от входа к выходу.
Смещение насыщения определяется как:
где:
D - смещение, указанное в физическом сигнальном порте D.
Значение DThreshold является заданным значением порога перемещения для параметра блока перехода мотор-насос.
Расчет расхода внутренней утечки и крутящего момента трения зависит от выбранного варианта блока. Если вариант блока является Analytical or tabulated data, расчеты также зависят от настройки параметров «Утечка» и «Трение». Существует пять возможных перестановок варианта блока и настроек параметризации.
Вариант 1: Расчет аналитической эффективности
Если активным вариантом блока является Analytical or tabulated data и параметризация утечки и трения имеет значение Analytical, расход утечки составляет
и крутящий момент трения
− 5),
где:
KHP - коэффициент Хагена-Пуасейля для ламинарных трубных потоков. Этот коэффициент вычисляется по указанным номинальным параметрам.
λ - динамическая вязкость термической жидкости, принимаемая здесь в качестве среднего значения ее значений в отверстиях термической жидкости.
k - коэффициент фрикционного момента в сравнении с коэффициентом усиления давления при номинальном смещении, который определяется по механическому КПД при номинальных условиях ,
τ0Δpnom.
startfr, nom - момент трения при номинальных условиях:
DnomΔpnom.
DNom - заданное значение параметра блока «Номинальное смещение».
start0 - заданное значение параметра блока крутящего момента без нагрузки.
startNom - заданное значение параметра блока Номинальная угловая скорость вала.
ΔpNom - заданное значение параметра Блок номинального перепада давления. Это перепад давления, при котором определяется номинальный объемный КПД.
Коэффициент Хагена-Пуасейля определяется по номинальным параметрам жидкости и компонента через уравнение
ΔpNom,
где:
startNom - заданное значение параметра Номинальная угловая скорость вала. Это угловая скорость, при которой определяется номинальная объемная эффективность.
мкНом - заданное значение параметра блока «Номинальная динамическая вязкость». Это динамическая вязкость, при которой определяется номинальная объемная эффективность.
λ v, Nom - заданное значение параметра блока Объемная эффективность при номинальных условиях. Это объемная эффективность, соответствующая указанным номинальным условиям.
Случай 2: Табличные данные по эффективности
Если активным вариантом блока является Analytical or tabulated data и параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies, расход утечки составляет
− α) 2,
и крутящий момент трения
Pump1 − («Трение»),
где:
α - численный параметр сглаживания для перехода мотор-насос.
- расход утечки в режиме двигателя.
- расход утечки в режиме насоса.
«Трение», «Двигатель» - момент трения в режиме двигателя.
«Трение», «Насос» - момент трения в режиме насоса.
Параметр сглаживания α задаётся гиперболической функцией
4DDThreshold),
где:
ΔpThreshold - заданное значение порога перепада давления для параметра блока перехода мотор-насос.
startThreshold - заданное значение порога Угловой скорости для параметра блока перехода мотор-насос.
DThreshold - заданное значение порога угловой скорости для параметра блока перехода мотор-насос.
Расход утечки вычисляется из объемной эффективности, величины, которая задается в табличной форме по Δp-ɷ-D области с помощью блочного параметра таблицы объемной эффективности. При работе в режиме двигателя (квадранты 1 и 3 графика Δp-ɷ-D, показанного на рисунке «Режимы работы») расход утечки составляет:
m˙,
где λ v - объемная эффективность, полученная либо интерполяцией, либо экстраполяцией табулированных данных. Аналогично, при работе в режиме насоса (квадранты 2 и 4 таблицы Δp-ɷ-D) расход утечки составляет:
m˙Ideal.
Крутящий момент трения аналогичным образом вычисляется на основе механической эффективности, величины, которая задается в табличной форме в области Δp-ɷ-D с помощью параметра блока таблицы механической эффективности. При работе в двигательном режиме (квадранты 1 и 3 диаграммы Δp-ɷ-D):
где λ m - механическая эффективность, полученная либо интерполяцией, либо экстраполяцией табулированных данных. Аналогично, при работе в режиме насоса (квадранты 2 и 4 диаграммы Δp-ɷ-D):
Случай 3: Табличные данные о потерях
Если активным вариантом блока является Analytical or tabulated data и параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical losses, расход утечки (объемный) определяется непосредственно в табличной форме по Δp-ɷ-D области:
DSat).
Массовый расход из-за утечки рассчитывается из объемного расхода:
Фрикционный момент точно так же указан в таблице:
DSat),
где qУтечка (Δp, λ) и (Δp, λ) - объемные и механические потери, полученные путем интерполяции или экстраполяции табулированных данных, заданных с помощью таблицы объемных потерь и параметров блока таблицы механических потерь.
Вариант 4: Физические сигнальные входы эффективности
Если активным вариантом блока является Input efficienciesрасчеты расхода утечки и крутящего момента трения являются такими, как описано для табличных данных эффективности (случай 2). Таблицы объемной и механической эффективности поиска заменяются физическими входами сигналов, которые задаются через порты EV и EM.
КПД определяются как положительные величины со значением от нуля до единицы. Входные значения за пределами этих границ устанавливаются равными ближайшей границе (ноль для входов меньше нуля, один для входов больше единицы). Другими словами, сигналы эффективности насыщаются на нуле и единице.
Случай 5: Физические сигнальные входы с потерями
Если вариант блока является Input lossesрасчеты расхода утечки и крутящего момента трения являются такими, как описано для табличных данных о потерях (случай 3). Таблицы объемных и механических потерь заменяются физическими входами сигналов, которые задаются через порты LV и LM.
Знаки входных данных игнорируются. Блок устанавливает знаки автоматически из рабочих условий, установленных при моделировании - точнее, из квадранта Δp-ɷ, в котором работает компонент. Другими словами, то, является ли ввод положительным или отрицательным, не имеет отношения к блоку.
Механическая работа, выполняемая двигателем, связана с обменом энергией. Уравнение энергетического баланса:
Pmech = 0,
где:
ФА и ФВ - расход энергии в портах А и В соответственно.
Pmech - механическая энергия, произведенная должный закрутить, τ, и моторная угловая скорость, ω:
Гидравлическая мощность двигателя является функцией разности давлений между отверстиями двигателя:
Сжимаемость жидкости незначительна.
Нагрузка на вал двигателя из-за инерции, трения и сил пружины ничтожна.
Параметры открытого блока зависят от варианта активного блока. См. раздел Исполнения блоков и параметризации потерь.
Вариант 1:Analytical or tabulated dataLeakage and friction parameterization - Параметризация, используемая для расчета расхода утечки и крутящего момента тренияAnalytical (по умолчанию) | Tabulated data — volumetric and mechanical efficiencies | Tabulated data — volumetric and mechanical lossesПараметризация используется для вычисления потерь расхода и крутящего момента из-за внутренних утечек и трения. Analytical параметризация основана на номинальных параметрах, обычно доступных на листах технических данных компонентов. Остальные табличные опции основаны на таблицах поиска для сопоставления перепада давления, угловой скорости и смещения с эффективностью или потерями компонентов.
Nominal displacement - Смещение, при котором определяется объемная эффективность30 cm^3/rev (по умолчанию) | скаляр с единицами измерения объема/углаПеремещение жидкости, при котором известна объемная эффективность компонента. Номинальные параметры обычно публикуются для стандартных рабочих условий в листах технических данных производителя. Блок использует этот параметр для вычисления, используя простые линейные функции, скорости потока утечки и крутящего момента трения.
Этот параметр активируется, если параметризация утечки и трения имеет значение Analytical.
Nominal shaft angular velocity - Угловая скорость вала, при которой определяется объемная эффективность188 rad/s (по умолчанию) | скаляр с единицами измерения угла/времениУгловая скорость вращающегося вала, при которой известна объемная эффективность компонента. Номинальные параметры обычно публикуются для стандартных рабочих условий в листах технических данных производителя. Блок использует этот параметр для вычисления, используя простые линейные функции, скорости потока утечки и крутящего момента трения.
Этот параметр активируется, если параметризация утечки и трения имеет значение Analytical.
Nominal pressure drop - Перепад давления, при котором определяется объемная эффективность10 MPa (по умолчанию) | скаляр с единицами измерения давленияПерепад давления от входа к выходу, при котором известна объемная эффективность компонента. Номинальные параметры обычно публикуются для стандартных рабочих условий в листах технических данных производителя. Блок использует этот параметр для вычисления, используя простую линейную функцию, внутреннего расхода утечки.
Этот параметр активируется, если параметризация утечки и трения имеет значение Analytical.
Nominal dynamic viscosity - Динамическая вязкость, при которой определяется объемная эффективность0.9 cP (по умолчанию) | скаляр с единицами площади/времениДинамическая вязкость гидравлической жидкости, при которой известна объемная эффективность компонента. Номинальные параметры обычно публикуются для стандартных рабочих условий в листах технических данных производителя. Блок использует этот параметр для вычисления, используя простую линейную функцию, внутреннего расхода утечки.
Этот параметр активируется, если параметризация утечки и трения имеет значение Analytical.
Volumetric efficiency at nominal conditions - Объемный КПД при заданных номинальных условиях0.92 (по умолчанию) | безразмерный скаляр между 0 и 1Объемный КПД, определяемый как отношение фактических и идеальных объемных расходов при заданных номинальных условиях. Номинальные параметры обычно публикуются для стандартных рабочих условий в листах технических данных производителя. Блок использует этот параметр для вычисления, используя простую линейную функцию, внутреннего расхода утечки.
Этот параметр активируется, если параметризация утечки и трения имеет значение Analytical.
No-load torque - Минимальный крутящий момент, необходимый для обеспечения вращения вала0 N*m (по умолчанию) | скаляр с единицами крутящего моментаКрутящий момент, необходимый для преодоления трения уплотнения и обеспечения вращения механического вала. Этот крутящий момент является независимым от нагрузки компонентом общего крутящего момента трения.
Этот параметр активируется, если параметризация утечки и трения имеет значение Analytical.
Mechanical efficiency at nominal conditions - Соотношение фактической и идеальной механической мощности0.88 (по умолчанию) | положительный скалярОтношение фактической механической мощности к идеальной механической мощности при номинальных условиях.
Чтобы включить этот параметр, задайте для параметра Утечка и трение значение Analytical.
Displacement threshold for motor-pump transition - Перемещение жидкости, при котором инициируется плавный переход между режимами работы насоса и двигателя0.5 cm^3/rev (по умолчанию) | положительный скаляр с единицами измерения объема/площадиПеремещение жидкости, ниже которого компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Cross-sectional area at ports A and B - Площадь потока на входе и выходе компонента0.01 m^2 (по умолчанию) | положительный скаляр с единицами площадиПлощадь потока на входе и выходе компонента. Предполагается, что площади равны. Этот параметр должен быть больше нуля.
Pressure drop vector for efficiencies, dp - перепады давления для определения объемной и механической эффективности;M-элементный вектор перепадов давления, при котором задаются табличные данные эффективности. Размер вектора M должен быть не меньше двух. Векторные элементы не обязательно должны быть равномерно разнесены. Однако они должны монотонно увеличивать значение слева направо.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Shaft angular velocity vector for efficiencies, w - Угловые скорости, при которых определяется объемная и механическая эффективностьN-элементный вектор угловых скоростей вала, при котором задаются табличные данные эффективности. Размер вектора N должен быть не меньше двух. Векторные элементы не обязательно должны быть равномерно разнесены. Однако они должны монотонно увеличивать значение слева направо.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Displacement vector for efficiencies, D - Смещения для определения объемной и механической эффективностиL-элементный вектор перемещений, при котором задаются табличные данные эффективности. Размер вектора N должен быть не меньше двух. Векторные элементы не обязательно должны быть равномерно разнесены. Однако они должны монотонно увеличиваться или уменьшаться.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Volumetric efficiency table, e_v(dp,w,D) - Объемная эффективность при заданных перепадах давления, угловых скоростях и смещенияхМатрица M-by-N-by-L с объемными КПД при заданных перепадах давления жидкости, угловых скоростях вала и смещениях. Эффективность должна быть в диапазоне 0–1. M, N и L - размеры указанных векторов таблицы поиска:
M - количество векторных элементов в векторе перепада давления для эффективности, параметр dp.
N - число векторных элементов в векторе угловой скорости вала для эффективности, параметр w.
L - число векторных элементов в векторе смещения для эффективности, параметр D.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Mechanical efficiency table, e_m(dp,w,D) - Механическая эффективность при заданных перепадах давления, угловых скоростях и смещенияхМатрица M-by-N-by-L с механическими КПД, соответствующими заданным перепадам давления жидкости, угловым скоростям вала и перемещениям. Эффективность должна быть в диапазоне 0–1. M, N и L - размеры указанных векторов таблицы поиска:
M - количество векторных элементов в векторе перепада давления для эффективности, параметр dp.
N - число векторных элементов в векторе угловой скорости вала для эффективности, параметр w.
L - число векторных элементов в векторе смещения для эффективности, параметр D.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Pressure drop threshold for motor-pump transition - Перепад давления, при котором инициируется плавный переход между режимами двигателя и насоса1e-3 MPa (по умолчанию) | скаляр с единицами измерения давленияПерепад давления от входа к выходу, ниже которого компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Angular velocity threshold for motor-pump transition - Угловая скорость вала, при которой инициируется плавный переход между режимами работы насоса и двигателя10 rad/s (по умолчанию) | скаляр с единицами измерения угла/времениУгловая скорость вала, ниже которой компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Displacement threshold for motor-pump transition - Перемещение жидкости, при котором инициируется плавный переход между режимами работы насоса и двигателя0.5 cm^3/rev (по умолчанию) | положительный скаляр с единицами измерения объема/площадиПеремещение жидкости, ниже которого компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies.
Check if operating beyond the octants of supplied tabulated data - Режим имитационного предупреждения для условий эксплуатации вне диапазона табулированных данныхNone (по умолчанию) | WarningРежим предупреждения моделирования для рабочих условий вне диапазона табулированных данных. Выбрать Warning должен быть уведомлен, когда перепад давления текучей среды, угловая скорость вала или мгновенное смещение пересекаются за пределами указанных табличных данных. Предупреждение не приводит к остановке моделирования.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical efficiencies или Tabulated data — volumetric and mechanical losses.
Pressure drop vector for losses, dp - перепады давления, при которых указываются объемные и механические потери;M-элементный вектор перепадов давления, при котором задаются табличные данные потерь. Размер вектора M должен быть не меньше двух. Векторные элементы не обязательно должны быть равномерно разнесены. Однако они должны монотонно увеличивать значение слева направо.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical losses.
Shaft angular velocity vector for losses, w - Угловые скорости для определения объемных и механических потерьN-элементный вектор угловых скоростей вала, при котором задаются табличные данные потерь. Размер вектора N должен быть не меньше двух. Векторные элементы не обязательно должны быть равномерно разнесены. Однако они должны монотонно увеличивать значение слева направо.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical losses.
Displacement vector for losses, D - Смещения для указания объемных и механических потерьL-элементный вектор перемещений, при котором задаются табличные данные потерь. Размер вектора N должен быть не меньше двух. Векторные элементы не обязательно должны быть равномерно разнесены. Однако они должны монотонно увеличиваться или уменьшаться.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical losses.
Volumetric loss table, q_loss(dp,w,D) - Расход внутренних протечек при заданных перепадах давления, угловых скоростях и смещенияхМатрица M-by-N-by-L с объемными потерями при заданных перепадах давления жидкости, угловых скоростях вала и смещениях. Объемные потери определяются здесь как объемный расход внутренней утечки между портом A и портом B. M, N и L являются размерами указанных векторов таблицы поиска:
M - число элементов вектора в векторе перепада давления для потерь, параметр dp.
N - число векторных элементов в векторе угловой скорости вала для потерь, параметр w.
L - число векторных элементов в векторе смещения для потерь, параметр D.
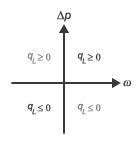
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам. Табличные данные по объемным потерям должны соответствовать условию, показанному на рисунке, с положительными значениями при положительных перепадах давления и отрицательными значениями при отрицательных перепадах давления.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical losses.
Mechanical loss table, torque_loss(dp,w,D) - Моменты трения при заданных перепадах давления, угловых скоростях и перемещенияхМатрица M-by-N-by-L с механическими потерями при заданных перепадах давления жидкости, угловых скоростях вала и смещениях. Механические потери определяются здесь как момент трения из-за уплотнений и внутренних компонентов. M, N и L - размеры указанных векторов таблицы поиска:
M - число элементов вектора в векторе перепада давления для потерь, параметр dp.
N - число векторных элементов в векторе угловой скорости вала для потерь, параметр w.
L - число векторных элементов в векторе смещения для потерь, параметр D.
Табличные данные не обязательно охватывают все октанты работы - октанты (ɷ, Δp, D). Достаточно указать данные для одного октанта. См. описание блока для режимов работы, соответствующих различным октантам. Табличные данные по механическим потерям должны соответствовать условию, показанному на рисунке, с положительными значениями при положительных угловых скоростях и отрицательными значениями при отрицательных угловых скоростях.
Этот параметр активируется, если параметризация утечки и трения имеет значение Tabulated data — volumetric and mechanical losses.
Input efficienciesMinimum volumetric efficiency - Нижняя граница насыщения на входном сигнале объемной эффективности1e-3 (по умолчанию) | безразмерный скаляр между 0 и 1Наименьшее допустимое значение объемной эффективности. Входной сигнал от порта EV физического сигнала насыщается при заданном значении. Если входной сигнал падает ниже минимальной объемной эффективности, то объемная эффективность устанавливается на минимальную объемную эффективность.
Этот параметр активируется, если для варианта блока установлено значение Input efficiencies.
Maximum volumetric efficiency - Верхний предел насыщения на входном сигнале объемной эффективности1 (по умолчанию) | безразмерный скаляр между 0 и 1Наибольшее допустимое значение объемной эффективности. Входной сигнал от порта EV физического сигнала насыщается при заданном значении. Если входной сигнал поднимается выше максимальной объемной эффективности, то объемная эффективность устанавливается на максимальную объемную эффективность.
Этот параметр активируется, если для варианта блока установлено значение Input efficiencies.
Minimum mechanical efficiency - Нижняя граница насыщения на входном сигнале объемной эффективности1e-3 (по умолчанию) | безразмерный скаляр между 0 и 1Наименьшее допустимое значение механической эффективности. Входной сигнал от порта EM физического сигнала насыщается при заданном значении. Если входной сигнал падает ниже минимального механического КПД, механический КПД устанавливается равным минимальному механическому КПД.
Этот параметр активируется, если для варианта блока установлено значение Input efficiencies.
Maximum mechanical efficiency - Верхний предел насыщения на входном сигнале объемной эффективности1 (по умолчанию) | безразмерный скаляр между 0 и 1Наибольшее допустимое значение механической эффективности. Вход от физического сигнального порта EM насыщается при этом значении. Если входной сигнал поднимается выше максимальной механической эффективности, механическая эффективность устанавливается на максимальную механическую эффективность.
Этот параметр активируется, если для варианта блока установлено значение Input efficiencies.
Pressure drop threshold for motor-pump transition - Перепад давления, при котором инициируется плавный переход между режимами двигателя и насоса1e-3 MPa (по умолчанию) | скаляр с единицами измерения давленияПерепад давления от входа к выходу, ниже которого компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Этот параметр активируется, если для варианта блока установлено значение Input efficiencies.
Angular velocity threshold for motor-pump transition - Угловая скорость, при которой инициируется плавный переход между режимами работы насоса и двигателя10 rad/s (по умолчанию) | скаляр с единицами измерения угла/времениУгловая скорость вала, ниже которой компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Этот параметр активируется, если для варианта блока установлено значение Input efficiencies.
Displacement threshold for motor-pump transition - Перемещение, при котором инициируется плавный переход между режимами работы насоса и двигателя0.5 cm^3/rev (по умолчанию) | скаляр с единицами измерения объема/углаАбсолютное значение мгновенного смещения, ниже которого компонент переходит между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Cross-sectional area at ports A and B - Площадь потока на входе и выходе компонента0.01 m^2 (по умолчанию) | положительный скаляр с единицами площадиПлощадь потока на входе и выходе компонента. Предполагается, что площади равны. Этот параметр должен быть больше нуля.
Input lossesPressure drop threshold for motor-pump transition - Перепад давления, при котором инициируется плавный переход между режимами двигателя и насоса1e-3 MPa (по умолчанию) | скаляр с единицами измерения давленияПерепад давления от входа к выходу, ниже которого компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Angular velocity threshold for motor-pump transition - Угловая скорость, при которой инициируется плавный переход между режимами работы насоса и двигателя10 rad/s (по умолчанию) | скаляр с единицами измерения угла/времениУгловая скорость вала, ниже которой компонент начинает переходить между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Displacement threshold for motor-pump transition - Перемещение, при котором инициируется плавный переход между режимами работы насоса и двигателя0.5 cm^3/rev (по умолчанию) | скаляр с единицами измерения объема/углаАбсолютное значение мгновенного смещения, ниже которого компонент переходит между двигательным и насосным режимами. Гиперболическое Tanh функция преобразует скорость потока утечки и крутящий момент трения так, чтобы переход был непрерывным и плавным.
Cross-sectional area at ports A and B - Площадь потока на входе и выходе компонента0.01 m^2 (по умолчанию) | положительный скаляр с единицами площадиПлощадь потока на входе и выходе компонента. Предполагается, что площади равны. Этот параметр должен быть больше нуля.
Check if operating beyond the motor mode - Режим имитационного предупреждения для условий эксплуатации вне режима моторированияNone (по умолчанию) | WarningРежим имитационного предупреждения для условий эксплуатации вне режима моторирования. При переходе двигателя в режим откачки выдается предупреждение. Выбрать Warning для уведомления о возникновении этого перехода. Предупреждение не приводит к остановке моделирования.
Mass flow rate into port A - Массовый расход в компонент через отверстие А для термической жидкости
1 kg/s (по умолчанию) | скаляр с единицами измерения массы/времениМасса жидкости, поступающей в компонент через вход в единицу времени в начале моделирования.
