В этом примере показано, как обнаруживать и реагировать на неисправность привода с помощью блока поворотного демпфера. Блок вращательного демпфера позволяет задать коэффициент демпфирования как функцию временных или поведенческих триггеров. Коэффициент демпфирования можно запрограммировать на изменение в определенное время при моделировании или когда количество ударов для данного ускорения превышает предел поведения при отказе модели. Моделирование неисправностей позволяет прогнозировать реакцию вашей физической системы на реальные неисправности. Он также позволяет проверить надежность и быстродействие системы управления.
В данном примере неисправность обнаруживается демпфером, который прикреплен к гибкому валу. Хотя большинство шагов в этом примере можно выполнить с помощью инструментов, предоставляемых пользовательскими интерфейсами Simulink ® и Simscape™ Driveline™, предоставляются сценарии. Сценарии можно объединить в более крупный сценарий для протягивания параметров.
Откройте модель. В командной строке MATLAB ® введите:
model = 'sdl_flexible_shaft';
open_system(model)
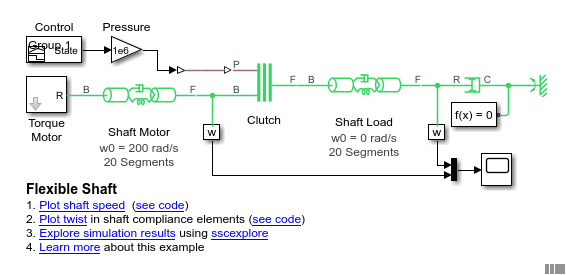
Эта модель содержит два гибких алюминиевых вала, смоделированных с использованием узлового параметрического подхода. Двигатель приводит в действие вал двигателя. К грузовому валу присоединен вязкий демпфер. Вязкий демпфер представлен блоком вращательного демпфера из библиотеки Simscape > Foundation Library > Mechanical > Rotational Elements. Блок поворотного демпфера библиотеки Foundation не может обнаруживать неисправности или реагировать на них.
Моделирование модели и печать результатов.
![]() Сценарий создания и вывода на печать результатов моделирования
Сценарий создания и вывода на печать результатов моделирования
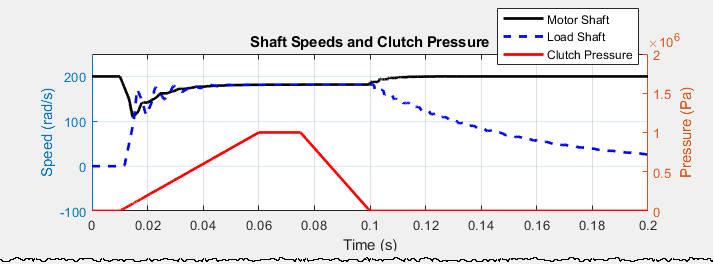
В начале моделирования муфта разблокируется, а ведомый вал свободен. Начальная скорость вала двигателя составляет указанные 200 рад/с, и система запускается в установившемся состоянии. Колебания, вызванные зацеплением и расцеплением муфты, обусловлены гибкостью валов.
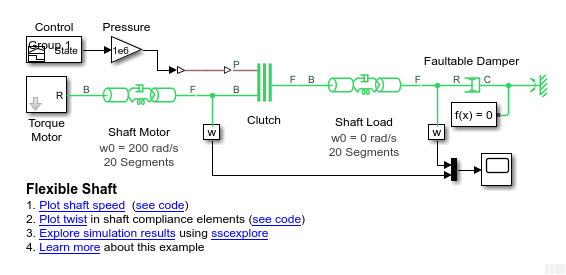
Замените демпфер Simscape на демпфер вращения приводов Simscape, который находится в библиотеке Simscape > Привод > Муфты и приводы > Пружины и демпферы. Маркируйте новый блок Неисправный демпфер.
![]() Сценарий замены поворотного демпферного блока
Сценарий замены поворотного демпферного блока
Включите ошибку на основе времени и укажите ответ, который включает изменение коэффициента демпфирования и генерацию предупреждения MATLAB. Используйте следующие значения для параметров отказа демпфера:
Включить отказы - Enabled
Коэффициент деформированного демпфирования - 10
Включение временного триггера отказа - Enabled
Время моделирования для события отказа - 0.06
Сообщение о возникновении неисправности - Warning
![]() Сценарий настройки поворотного блока демпфера с использованием временного сбоя
Сценарий настройки поворотного блока демпфера с использованием временного сбоя
Моделирование модели и печать результатов.
![]() Сценарий создания и вывода на печать результатов моделирования
Сценарий создания и вывода на печать результатов моделирования
Warning: At time 0.060000, one or more assertions are triggered. A fault event has occurred The assertion comes from: Block path: sdl_flexible_shaft/Faultable Damper Assert location: (location information is protected)
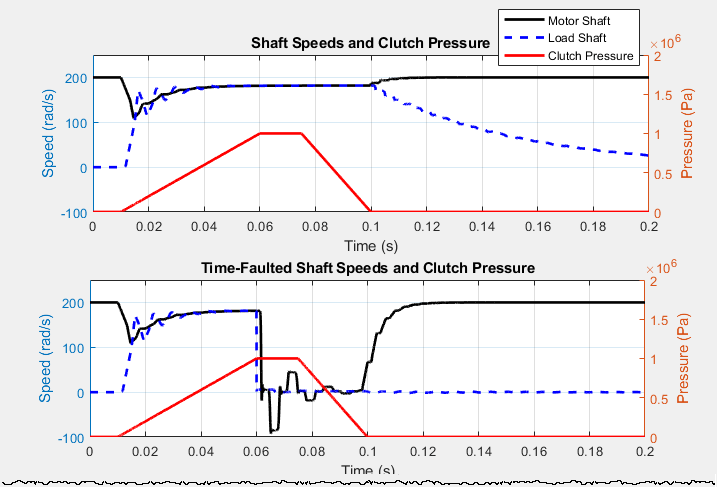
Во время моделирования t = 0,06 с, время, указанное для неисправности, выдается предупреждение. Коэффициент демпфирования падает и замедляет скорость обоих валов.
Включите сбой на основе удара и укажите ответ, который включает изменение коэффициента демпфирования и генерацию предупреждения MATLAB. Затем смоделируйте модель и постройте график новых результатов. Используйте следующие значения для параметров отказа демпфера:
Включить отказы - Yes
Коэффициент деформированного демпфирования - 150
Включение временного триггера отказа - Disabled
Включить триггер поведенческого сбоя - Enabled
Максимально допустимое ускорение - 50
Максимальное количество ударов - 2
Сообщение о возникновении неисправности - Warning
![]() Сценарий настройки поворотного блока демпфера с использованием временного сбоя
Сценарий настройки поворотного блока демпфера с использованием временного сбоя
Моделирование модели и печать результатов.
![]() Сценарий создания и вывода на печать результатов моделирования
Сценарий создания и вывода на печать результатов моделирования
Warning: At time 0.026048, one or more assertions are triggered. A fault event has occurred The assertion comes from: Block path: sdl_flexible_shaft/Faultable Damper Assert location: (location information is protected)
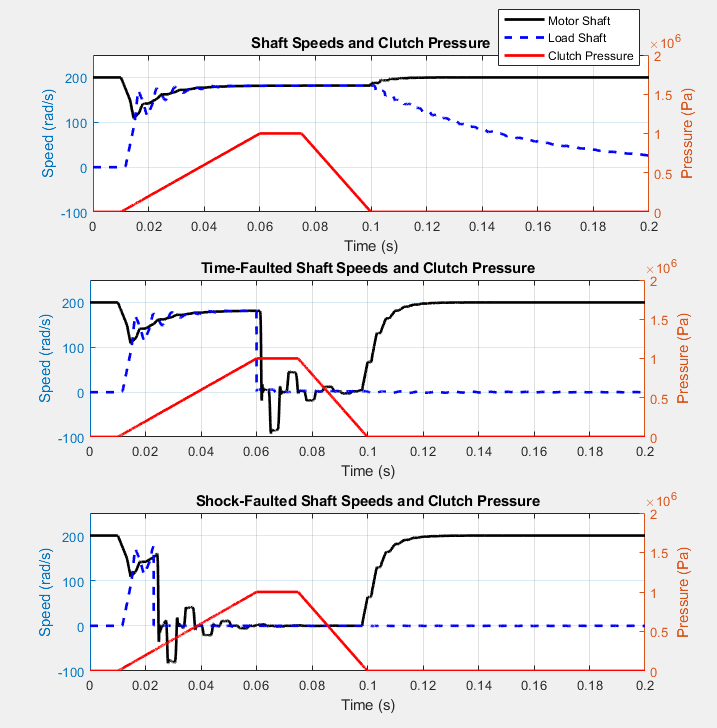
При времени моделирования t = 0,026 с достигается максимальное количество ударов для указанного ускорения. Выдается предупреждение, и коэффициент демпфирования увеличивается и замедляет скорость обоих валов.
