sdl_transmission_4spd_crcr Пример моделирует реалистичную передачу. Используется подсистема передачи CR-CR 4-Speed для передачи движения и крутящего момента с одного вала и инерции на другой.
Модель передачи CR-CR 4-Speed
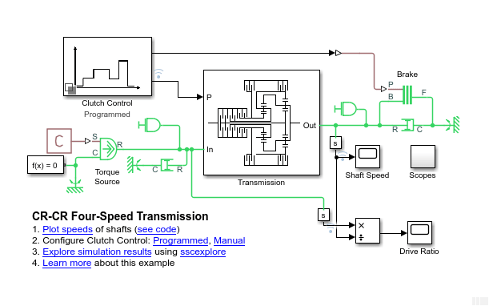
Имеется постоянный вращающий момент от источника крутящего момента к приводному валу (блок инерции слева). Две демпфирующие подсистемы прикладывают к приводному и ведомому валам соответственно сильное и легкое вязкое трение. Две подсистемы объема работ измеряют давление сцепления. Рабочее пространство модели определяет важные параметры блоков. Сведения о создании, доступе и изменении переменных рабочей области модели см. в разделах Указание источника данных в рабочей области модели и Изменение данных рабочей области модели.
Подсистема передачи CR-CR 4-Speed соединяет привод с ведомым валом (блок инерции справа). Если трансмиссия выведена из зацепления, тормозная муфта и неподвижный корпус позволяют тормозить ведомый вал.
Для ясности главные сигнальные шины модели были объединены в виде векторов и направлены с использованием блоков Goto и From. Давления сцепления собираются в подсистеме объема для удобства.
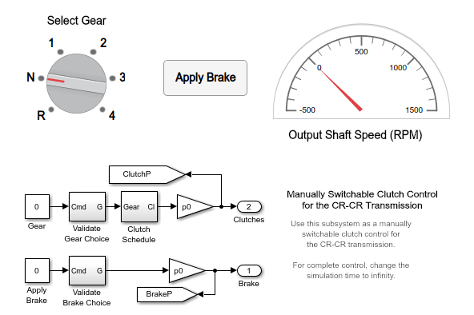
Модель представляет систему управления сцеплением с использованием блока Variant Subsystem. Чтобы переключиться между запрограммированными и ручными режимами управления, которые предоставляет вариант, щелкните ссылки в окне модели. Во время моделирования ручная подсистема обеспечивает непосредственное управление переключением передач. Для переключения передач в режиме ручного управления:
На панели инструментов Simulink ® измените время моделирования на inf.
Запустить моделирование.
Изменение зубчатых колес во время использования графического элемента «Выбор зубчатого колеса».
Ручное управление сцеплением для трансмиссии CR-CR