В этом примере показано, как можно получить доступ и проанализировать информацию о пересечениях нулей во время моделирования. По умолчанию данные пересечения нулей не регистрируются. Если установлен флажок Статистика моделирования журнала, переменная журнала моделирования содержит дополнительную SimulationStatistics узел для каждого блока, который может создавать нулевые пересечения, по цене более медленной скорости моделирования и более интенсивного потребления памяти.
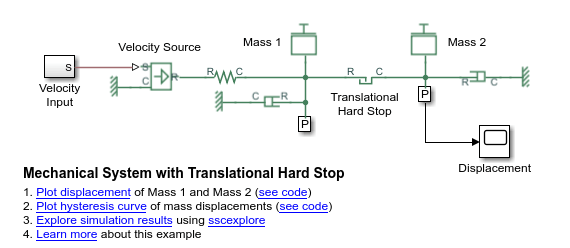
Откройте пример модели Mechanical System with Translational Hard Stop, введя ssc_mechanical_system_translational_hardstop в окне команд MATLAB ® .
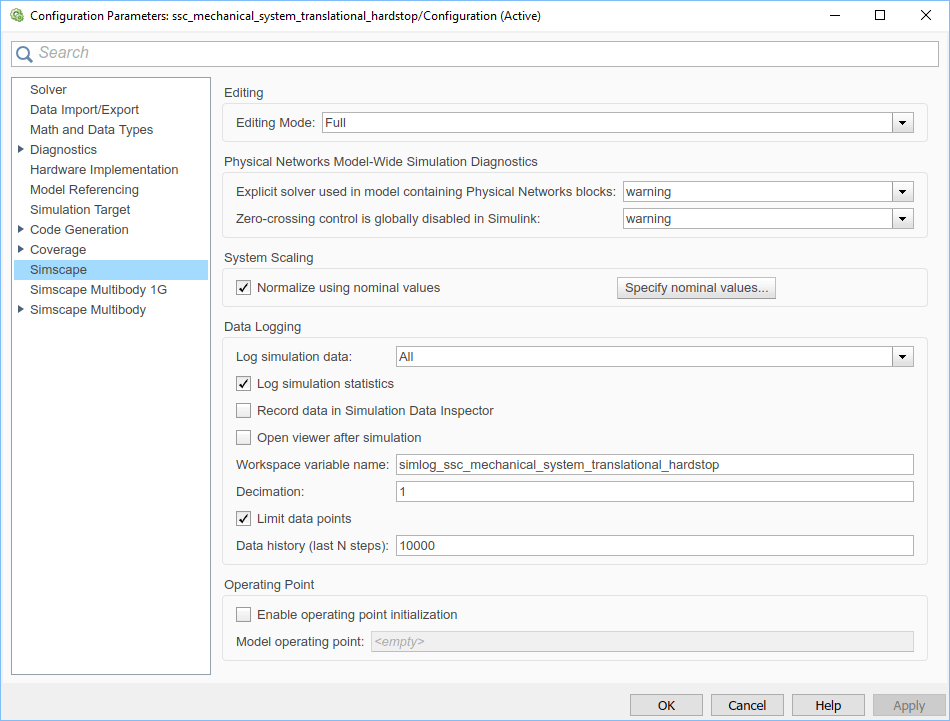
Откройте диалоговое окно «Параметры конфигурации» и на левой панели выберите «Simscape». Можно видеть, что в этой модели уже включен журнал данных для всей модели, а также статистика моделирования, и что имя переменной рабочей области имеет значение simlog_ssc_mechanical_system_translational_hardstop.
Моделирование модели. Создается переменная рабочего пространства с именем simlog_ssc_mechanical_system_translational_hardstop (как указано параметром Имя переменной рабочей области), который содержит данные моделирования. Поскольку установлен флажок Статистика моделирования журнала (Log simulation statistics), переменная рабочей области содержит дополнительные узлы, представляющие данные пересечения нулей.
simlog переменная имеет ту же иерархию, что и модель. Для просмотра всей структуры переменных в командной строке введите:
simlog_ssc_mechanical_system_translational_hardstop.print
Эта команда используется для печати всего дерева данных.
ssc_mechanical_system_translational_hardstop
+-Damper_M1
| +-C
| | +-v
| +-R
| | +-v
| +-f
| +-v
+-Damper_M2
| +-C
| | +-v
| +-R
| | +-v
| +-f
| +-v
+-MTRef_DM1
| +-V
| +-v
+-MTRef_DM2
| +-V
| +-v
+-MTRef_VS
| +-V
| +-v
+-Mass_1
| +-M
| | +-v
| +-f
| +-v
+-Mass_2
| +-M
| | +-v
| +-f
| +-v
+-Sensor_M1
| +-Ideal_Translational_Motion_Sensor
| | +-C
| | | +-v
| | +-P
| | +-R
| | | +-v
| | +-V
| | +-f
| | +-v
| | +-x
| +-MTRef
| | +-V
| | +-v
| +-PS_Terminator
| | +-I
| +-PS_Terminator1
| +-I
+-Sensor_M2
| +-Ideal_Translational_Motion_Sensor
| | +-C
| | | +-v
| | +-P
| | +-R
| | | +-v
| | +-V
| | +-f
| | +-v
| | +-x
| +-MTRef
| +-V
| +-v
+-Spring_M1
| +-C
| | +-v
| +-R
| | +-v
| +-f
| +-v
| +-x
+-Translational_Hard_Stop
| +-C
| | +-v
| +-R
| | +-v
| +-SimulationStatistics
| | +-zc_1
| | | +-crossings
| | | +-values
| | +-zc_2
| | +-crossings
| | +-values
| +-f
| +-v
| +-x
+-Velocity_Source
+-C
| +-v
+-R
| +-v
+-S
+-f
+-vПод Translational_Hard_Stop узел, существует узел с именем SimulationStatistics, которая содержит информацию о пересечении нуля. Это означает, что поступательная жесткая остановка является единственным блоком в модели, который может создавать пересечения нулей во время моделирования.
Эти данные можно получить и проанализировать аналогично другим данным, зарегистрированным в рабочей области во время моделирования. Дополнительные сведения см. в разделе simscape.logging.Node и simscape.logging.Series справочные страницы.
