Количество и типы соединений, зубчатых колес и ограничений в механизме частично определяют его подвижность - общее число степеней свободы, или DoF, которые предоставляет механизм, и, следовательно, минимальное количество входных переменных, необходимых для полного ограничения его конфигурации. Подвижность F механизма с N телами и j сочленениями, каждое с f DoF следует из таких выражений, как критерий Кутцбаха, который для планарного механизма утверждает:
(3 − fi)
Применение этого критерия к четырехпалубному соединению, сборке из четырех тел (n = 4) и четырех соединений (j = 4) с одним вращающимся DoF каждого (fi = 1), дает подвижность одного DoF - указывая, что для полного управления конфигурацией соединения достаточно одной входной переменной. По мере усложнения механизмов вычисление совокупных DoF вручную становится более трудоемким, поэтому Simscape™ Multibody™ автоматически вычисляет их для вас.
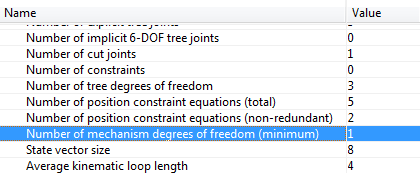
Можно просмотреть DoF механизма с помощью Simscape Statistics Viewer, показанного ниже для примера с четырьмя полосами. Откроется средство просмотра статистики. В коллекции «Приложения» выберите «Просмотр переменных Simscape». Войти sm_four_bar в командной строке MATLAB ®, чтобы открыть четырехполосную модель и просмотреть ее DoF через средство просмотра статистики.