В этом примере показано, как изменить параметры электропривода с использованием модели электропривода AC3. В этом примере номинальная мощность мотора меняется с 200 л.с. на 5 л.с. Для повторного запуска параметров диска:
Откройте пример: ac3_example. Напечатать ac3_example в окне команд MATLAB ® .
Параметры установлены для мотора мощностью 200 л.с.
Моделирование модели в режиме ускорителя и наблюдение за результатами.
Дважды щелкните по полевому управляющему приводу асинхронного двигателя и выберите вкладку Асинхронная машина. Скопируйте эти параметры двигателя мощностью 5 л.с. в маску привода.
| Параметр | Стоимость |
|---|---|
| Опорная рамка | Rotor |
| Модель дискретного решателя | Forward Euler |
| Электрические параметры > Номинальные значения > Мощность | 3730 |
| Электрические параметры > Номинальные значения > Напряжение | 460 |
| Электрические параметры > Номинальные значения > Частота | 60 |
| Электрические параметры > Эквивалентные значения цепи > Статор основной обмотки > Сопротивление | 1.115 |
| Электрические параметры > Эквивалентные значения цепи > Статор основной обмотки > Индуктивность утечки | 0.005974 |
| Электрические параметры > Эквивалентные значения цепи > Статор основной обмотки > Взаимная индуктивность | 0.2037 |
| Электрические параметры > Эквивалентные значения цепи > Ротор основной обмотки > Сопротивление | 1.083 |
| Электрические параметры > Эквивалентные значения цепи > Ротор основной обмотки > Индуктивность утечки | 0.005974 |
| Электрические параметры > Начальные токи > Ia_Magnitude | 0 |
| Электрические параметры > Начальные токи > Ia_Phase | 0 |
| Электрические параметры > Начальные токи > Ib_Magnitude | 0 |
| Электрические параметры > Начальные токи > Ib_Phase | 0 |
| Электрические параметры > Начальные токи > Ic_Magnitude | 0 |
| Электрические параметры > Начальные токи > Ic_Phase | 0 |
| Механические параметры > Инерция | 0.02 |
| Механические параметры > Коэффициент трения | 0.005752 |
| Механические параметры > Пары полюсов | 2 |
| Начальные значения > Проскальзывание | 1 |
| Начальные значения > Угол | 0 |
Чтобы измерить сигналы, связанные с регулятором потока, добавьте эти блоки в подсистему демультиплексора.
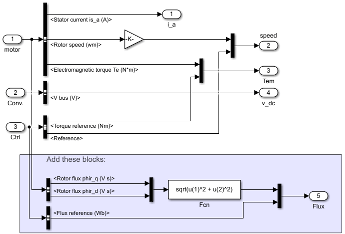
Перейдите на вкладку Controller (Контроллер) в маске блока Field-Oriented Control Incutive Motor Drive (Полевое управление приводом асинхронного двигателя). Установите тип правил в значение Torque regulation для доступа к параметрам контроллера.
Режим регулирования крутящего момента необходим для обхода параметров регулятора скорости и действия непосредственно на контроллер полевого управления (ВОК).
Ток, регулируемый контроллером ВОК, зависит от машинного потока. Регулятор потока обеспечивает правильное приложение требуемого потока к машине.
Скопируйте эти параметры в маску диска:
| Параметр | Стоимость |
|---|---|
| Машинный поток > Начальный | 0.705 |
| Машинный поток > Номинальный | 0.705 |
| Полевое управление > Регулятор потока > Пропорциональный коэффициент усиления | 1 |
| Полевое управление > Регулятор потока > Интегральное усиление | 0 |
| Полевое управление > Регулятор потока > Частота отключения низкочастотного фильтра | 10e3 |
| Полевое управление > Регулятор потока > Пределы выхода потока > Отрицательное | -0.705*1.5 |
| Полевое управление > Регулятор потока > Пределы выхода потока > Положительный | 0.705*1.5 |
| Полевое управление > Текущий контроллер Гистерезисная полоса пропускания | 1 |
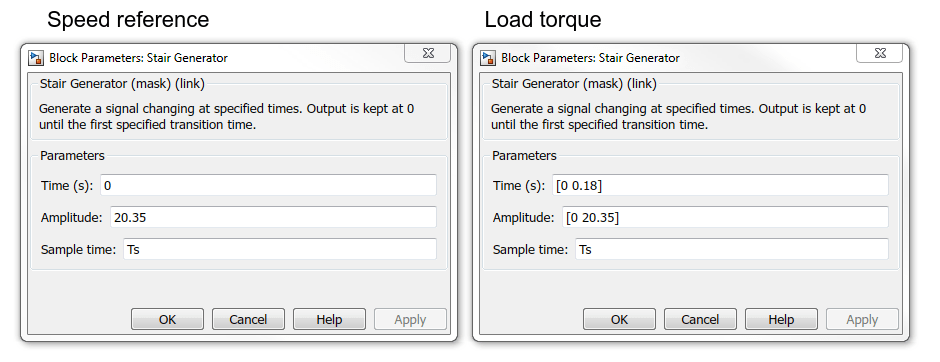
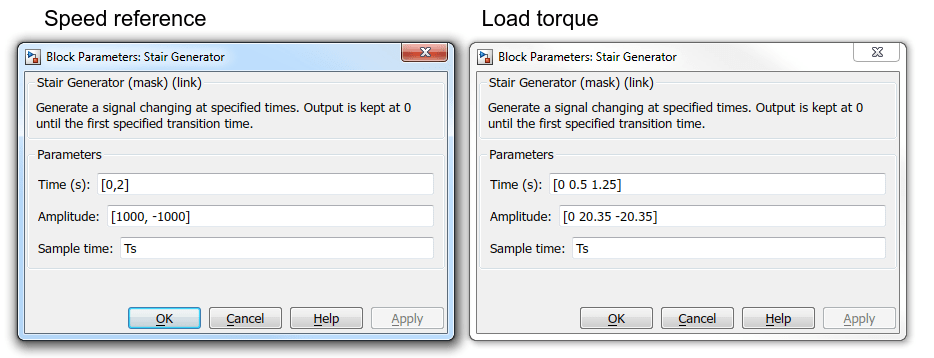
Чтобы применить номинальный крутящий момент к двигателю, измените параметры блоков генератора лестниц в подсистеме привязки скорости и в подсистеме нагрузки крутящего момента.
На вкладке «Ведение журнала» блока «Область» установите для параметра «Прореживание» значение 1 и имя переменной для simout1. Выберите «Регистрировать данные в рабочей области» и задайте для параметра «Сохранить формат» значение Structure With Time.
Смоделировать систему на 0,5 с. Откройте инструмент анализа БПФ блока powergui.
В списке «Ввод» выберите Stator current сигнал и установить Время запуска на 0.23, Количество циклов до 1, Основная частота до 7.5и максимальная частота (Гц) до 20000 Гц.
Щелкните Показать (Display), чтобы получить график БПФ.
Следует отметить, что частота переключения составляет около 5 кГц. Чтобы ослабить эту частоту, установите для параметра частоты отсечки фильтра нижних частот контроллера потока 500 Гц.
Откройте блок «Scope» и проверьте сигнал потока. Следует отметить, что погрешность установившегося состояния высока.

Постепенно увеличивайте параметр пропорционального усиления регулятора потока и имитируйте его, пока не получите удовлетворительный отклик. Увеличение коэффициента усиления выше определенного значения может привести к насыщению регулятора потока. Кривая на следующем графике основана на пропорциональном усилении 100.

Постепенно увеличивайте интегральный коэффициент усиления контроллера потока и имитируйте его до тех пор, пока не получите удовлетворительный установившийся результат с минимальной погрешностью. Следующий сюжет основан на интегральном усилении 90.
Выберите вкладку «Controller» (Контроллер) в маске блока «Field-Oriented Control Incutive Motor Drive» (Полевое управление) и установите тип «Regulation» (Регулирование) в значение Speed regulation для редактирования параметров контроллера.
| Параметр | Стоимость |
|---|---|
| Регулятор скорости > Пределы выхода крутящего момента > Отрицательный | -1200*1.5 |
| Регулятор частоты вращения > Пределы выхода крутящего момента > Положительный | 1200*1.5 |
| Регулятор скорости > PI регулятор > Пропорциональный коэффициент усиления | 1 |
| Регулятор скорости > PI регулятор > Интегральный коэффициент усиления | 0 |
| Регулятор скорости > Частота отсечки скорости | 500 |
| Полевое управление > Максимальная частота переключения | 500 |
Ускорение клина скорости должно рассчитываться во избежание превышения предельного значения крутящего момента. Требуемый крутящий момент для ускорения двигателя при 1750 об/мин/с определяется:
Нм
Чтобы применить номинальный крутящий момент к двигателю, измените параметры блоков генератора лестниц в подсистеме привязки скорости и в подсистеме нагрузки крутящего момента.
Установите для прореживания области значение 25, чтобы предотвратить перегрузку памяти. Запустите моделирование.
Проверьте сигнал скорости на блоке Scope. Погрешность установившегося состояния высока, и время отклика неприемлемо.

Постепенно увеличивайте параметр пропорционального усиления регулятора скорости и имитируйте его до тех пор, пока не получите удовлетворительное время отклика без превышения. Следует отметить, что если коэффициент усиления слишком высок, система будет колебательной. Следующий график основан на пропорциональном усилении 3.

Постепенно увеличивайте интегральный коэффициент усиления контроллера скорости и имитируйте его до тех пор, пока не получите удовлетворительное значение устойчивого состояния с минимальной погрешностью устойчивого состояния. Эта кривая основана на интегральном усилении 100.
Выберите вкладку Converter and DC bus (преобразователь и шина постоянного тока) в маске блока полевого привода управляющего асинхронного двигателя для настройки параметров конденсатора шины постоянного тока и тормозного прерывателя.
Установите для параметра «Емкость шины постоянного тока» значение 167e-6.
Емкость шины постоянного тока вычисляется для уменьшения пульсации напряжения.
где:
Pmotor - номинальная мощность моторного привода (Вт).
f - частота источника переменного тока (Гц).
ΔV - желаемая пульсация напряжения (V).
VDC - среднее напряжение шины постоянного тока (В).
Это уравнение дает приблизительное значение конденсатора, требуемого для данного уровня пульсации напряжения. Здесь желаемая пульсация напряжения составляет 50 В.
Электропривод мощностью 5 л.с. (3728 Вт) питается от трехфазного источника частотой 60 Гц. Среднее напряжение шины постоянного тока задается следующим образом:
VDC = 1,35· VLL,
Требуемый конденсатор тогда равен
Установите напряжение отключения тормозного прерывателя на 660V, а напряжение включения тормозного прерывателя на 700 В.
В режиме двигателя пиковое напряжение шины постоянного тока равно
Напряжение отключения (Vшут) тормозного рубильника должно быть немного выше этого значения. Для ограничения увеличения напряжения при рекуперативном торможении напряжение отключения устанавливается на 660 В, а напряжение активации (Vact) - на 700 В.
Установите сопротивление тормозного прерывателя 131 Ом.
Сопротивление тормозного рубильника рассчитывается с использованием следующего уравнения:
131 Ом
Моделирование системы и наблюдение за шестью разделами результатов моделирования.
Ускорение без нагрузки
Применяется номинальный момент нагрузки
Скорость в установившемся состоянии
Номинальный генерирующий крутящий момент: Наблюдайте превышение напряжения шины постоянного тока
Замедление
Ускорение отрицательной скорости
