Дискретное управление напряжением постоянного тока PI с подавлением нуля с обратной связью и интегральной защитой
Simscape/Electrical/Control/Общее управление машиной
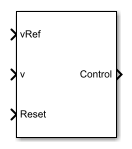
Блок контроллера напряжения постоянного тока реализует управление напряжением постоянного тока на основе дискретного времени PI. Блок может реализовать подавление нуля в тракте прямой связи. Чтобы избежать насыщения интегрального усиления, блок может реализовать усиление, препятствующее намотке.
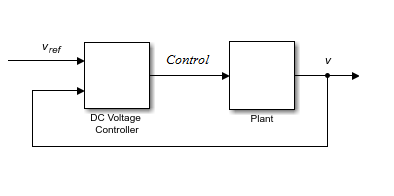
Уравнение, которое блок контроллера напряжения постоянного тока использует для вычисления управляющего сигнала:
vref − v),
где:
управляющий сигнал, который выражается как рабочий цикл или ток.
Kp - пропорциональный коэффициент усиления.
Ki - интегральное усиление.
Ts - время выборки.
vref - опорное напряжение.
v - измеренное напряжение.
Расчет управления PI дает ноль в функции передачи с замкнутым контуром. Для отмены нуля блок использует эту передаточную функцию отмены нуля дискретного времени:
KpKiKpKi).
Чтобы избежать насыщения выходного сигнала интегратора, блок использует антиобмоточный механизм. Тогда коэффициент усиления интегратора равен
controlunsat),
где:
Kaw - это усиление против ветвей.
control _ sat - насыщенный управляющий сигнал, который блок вычисляет как control _ max ),
где:
control lunsat - ненасыщенный управляющий сигнал.
control - нижний предел для управляющего сигнала.
vmax - верхний предел для управляющего сигнала.
