Дискретно-временной PI-контроллер с внешним антиобмоточным входом
Simscape / Электрический / Контроль / Общий Контроль
Блок дискретного контроллера PI реализует дискретное управление PI с внешним входом защиты от намотки.
Эта схема представляет собой эквивалентную схему для контроллера с внешним входом защиты от обмотки.
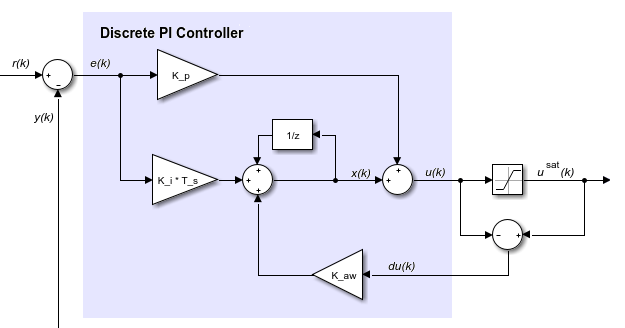
Блок дискретного PI контроллера вычисляет управляющий сигнал с использованием обратного метода дискретизации Эйлера:
Цз − 1] е (k),
где
u - управляющий сигнал.
Kp - коэффициент пропорционального усиления.
Ki - интегральный коэффициент усиления.
Kaw - коэффициент усиления против намотки.
Ts - период выборки.
e - сигнал ошибки.
Для предотвращения чрезмерного перестрелки блок может использовать обратный расчет для реализации внешнего противообмоточного механизма. Он вводит du (k), разность между насыщенным управляющим сигналом usat (k) и вычисленным ненасыщенным управляющим сигналом u (k). Затем он умножает разность на коэффициент противодействия намотке и добавляет усиленный сигнал из интегрального коэффициента усиления.
[1] Острём, К. и Т. Хегглунд. Расширенный контроль PID. Исследовательский треугольник парк, NC: ISA, 2005.



