Дискретно-временной ПИ-контроль с интегральной защитой от навивки
Simscape / Электрический / Контроль / Общий Контроль
Дискретный ПИ-контроллер с интегральным антиобмоточным блоком реализует дискретное ПИ-управление с внутренним противообмоточным устройством. На рисунке показана эквивалентная схема контроллера с внутренней защитой от обмотки.
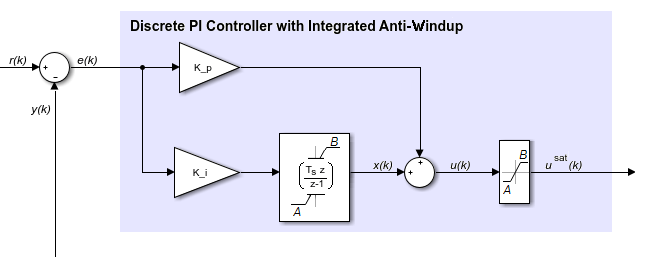
Блок вычисляет управляющий сигнал с использованием обратного метода дискретизации Эйлера:
, A, B), A, B),
, A), B),
где:
u - управляющий сигнал.
Kp - коэффициент пропорционального усиления.
e - сигнал ошибки.
Ki - интегральный коэффициент усиления.
Ts - период выборки.
A - нижний предел насыщения.
B - верхний предел насыщения.
[1] Рекомендуемая практика IEEE для моделей систем возбуждения для исследований устойчивости энергосистемы. IEEE Std 421.5/D39. Пискатауэй, Нью-Джерси: IEEE-SA, 2015.




