Предельное напряжение в системе отсчета прямой квадратуры ротора
Simscape / Электрический / Контроль / Защита
Блок ограничителя напряжения d-q реализует ограничитель напряжения в опорном кадре прямой квадратуры ротора (d-q).
На рисунке показана окружность, ограничивающая вектор напряжения d-q.
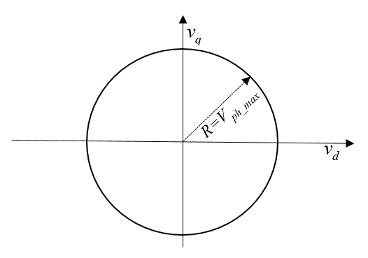
То есть
где:
vd - напряжение по оси d.
vq - напряжение по оси q.
Vph_max - максимальное фазовое напряжение.
Возможны три случая ограничения напряжения:
Расстановка приоритетов по d-оси
расстановка приоритетов по оси q
Эквивалентность d-q
Если одна ось имеет приоритет над другой, ограниченные или насыщенные напряжения определяются как
Vph _ max)
и
V2 _ max),
где:
v1sat) 2
v1 - напряжение приоритетной оси.
v2 - напряжение неприоритетной оси.
Если ни одна из осей не имеет приоритета, то ограниченные напряжения определяются как
, Vd _ max)
и
Vq _ max),
где:
vqunsat) 2
vqunsat) 2



