Адаптивное управление ссылочной моделью на основе PID с дискретным временем
Simscape / Электрический / Контроль / Общий Контроль
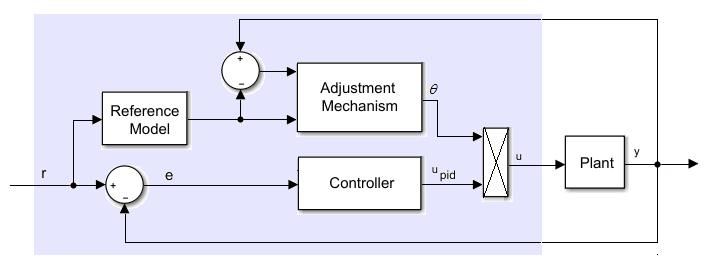
Блок эталонного адаптивного контроллера модели реализует дискретное пропорционально-интегрально-производное (PID) модель эталонного адаптивного управления (MRAC). Тремя основными компонентами системы MRAC являются эталонная модель, механизм регулировки и контроллер.
Уравнение управления:
1Tsz] e (k),
где:
upid - выходной сигнал контроллера.
Kp - пропорциональный коэффициент усиления.
Ki - интегральное усиление.
Kd - дифференциальное усиление.
Ts - время выборки.
e - ошибка.
Ссылочная модель является передаточной функцией для системы с замкнутым контуром. Эта модель фиксирует требуемое поведение системы с замкнутым контуром. Он реализован как функция дискретной передачи времени
A (z).
Механизм адаптации корректирует действие управления на основе ошибки между выходом установки и выходом эталонной модели как
γ Цзз − 1,
где:
start- параметр адаптации.
y - выход установки.
ym - вывод ссылочной модели.
γ - скорость обучения.
Увеличение значения γ приводит к более быстрой адаптации к изменениям растений.
Регулируемый управляющий сигнал u равен
start( k).
[1] Батлер, Н. Модель - Эталонный адаптивный контроль - от теории до практики. Река Верхнее Седло, Нью-Джерси: Прентис Холл, 1992.
