Прогнозирующее управление с использованием полиномиального представления
Simscape / Электрический / Контроль / Общий Контроль
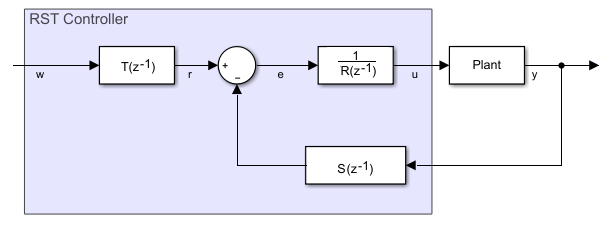
Блок контроллера RST реализует обобщенный прогнозирующий контроллер, используя полиномиальное представление отслеживания опорного сигнала. На схеме показана эквивалентная схема алгоритма управления.
Управляемая авторегрессионная интегрированная модель скользящего среднего (CARIMA) описывает завод:
+ e (k) C (z − 1) D (z − 1)
=1+a1z−1+⋯+anAz−nA
=b0+b1z−1+⋯+bnBz−nB
) = 1
− z − 1,
где:
d - время простоя системы.
y (k) - производительность установки.
u (k) - выходной сигнал контроллера.
e (k) - белый шум с нулевым средним значением.
A (z-1) и B (z-1) являются системными многочленами.
nA и nB - степени многочленов.
C (z-1) и D (z-1) являются полиномами возмущений для получения ошибки установившегося состояния.
Модель прогнозирования задается как
1) C (z − 1) u (k − 1) + Fj − d (z − 1) C (z − 1) y (k)
и
л.с.
где:
Привет - это минимальный прогноз.
hp - горизонт прогнозирования.
Будущая управляющая последовательность, вычисленная в момент времени k, равна
1 | k),
где
hc пр
и hc - горизонт управления.
Прогнозируемые значения выходного сигнала:
j 'k).
Для определения системных многочленов − d (z Hj − d (z − 1) блок использует два диофантовых уравнения. Первое уравнение Диофантина
dFj − d (z − 1) A (z − 1) D (z − 1),
где:
=1+1+e1z−1+⋯+enEz−nE
=f0+f1z−1+⋯+fnFz−nF
d − 1
nC − j + d)
Второе уравнение Диофантина
− 1) + z − j + dHj − d (z − 1),
где:
=g0+g1z−1+⋯+gnGz−nG
=h0+h1z−1+⋯+hnHz−nH
d − 1
+ d) − 1
Результирующая модель прогнозирования
1u (k + j) + y ^ 0 (k + j' k),
где
− 1) + Fj − d (z − 1) C (z − 1) y (k)
представляет собой свободный отклик системы.
Используя матричную нотацию, модель прогнозирования может быть записана как
y ^ 0,
где:
), ⋯,y^ (k + hp' k)] T
u (k + hc − 1)] T
k), ⋯,y^0 (k + hp' k)] T
Чтобы минимизировать ошибки отслеживания и выходные данные контроллера, блок использует функцию затрат. Для компромисса между минимизацией ошибки отслеживания и минимизацией выходного сигнала контроллера блок использует весовой коэффициент λ, такой, что
^ 0 − w) + λ udTud
для
+ i) = 0
и
где w - вектор опорной траектории. Минимизация функции затрат дает уравнение для оптимальной последовательности управления:
w − y ^ 0].
Так как γ j и hp β являются элементами в первой строке λ Ihc) − 1GT, применение принципа отходящего горизонта дает уравнение алгоритма управления как
^ 0 (k + j' k)].
Подстановка с использованием − 1) + Fj − d (z − 1) C (z − 1) y (k) дает такую форму уравнения алгоритма управления:
(k) +∑j=hihpγjC (z − 1) w (k + j).
Полиномиальная форма алгоритма управления выглядит следующим образом:
T (z − 1) w (k + hp),
где:
1)) D (z − 1),
z − 1),
и
∑j=hihpγjz−hp+j.
Чтобы получить многочлены R, R и T, используйте дискретное время вместо функции передачи непрерывного времени.
[1] Камачо, Э. Ф. и К. Бордонов. Модельный предиктивный контроль. Второе издание, Лондон: Springer, 2007.


