Дискретно-временной синхронный контроллер тока PI машины
Управление Simscape/Electrical/Control/SM
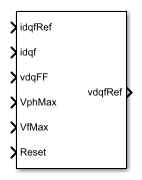
Блок контроллера тока SM реализует контроллер тока синхронной машины на основе дискретного времени PI (SM) в опорной системе d-q ротора.
Блок дискретизируется с использованием обратного метода Эйлера благодаря простоте и стабильности первого порядка.
Три контроллера тока PI, реализованные в системе отсчета ротора, создают вектор опорного напряжения:
vd _ FF,
vq _ FF,
и
if),
где:
, и - опорные напряжения d-оси, q-оси и поля соответственно.
, и - опорные токи d-оси, q-оси и поля соответственно.
, и являются токами d-оси, q-оси и поля соответственно.
Kp_id, Kp_iq и Kp_if являются пропорциональными коэффициентами усиления для контроллеров d-оси, q-оси и поля соответственно.
Ki_id, Ki_iq и Ki_if являются интегральными коэффициентами усиления для контроллеров d-оси, q-оси и поля соответственно.
vd_FF и vq_FF являются напряжениями прямой связи для d-оси и q-оси соответственно, полученными из математических уравнений машины и предоставленными в качестве входных данных.
Ts - время выборки дискретного контроллера.
Использование управления PI приводит к нулю в функции передачи с замкнутым контуром, которая может быть отменена путем введения блока отмены нуля в тракт прямой связи. Функции переноса отмены нуля за дискретное время:
idKp _ idKi _ id),
iqKp _ iqKi _ iq),
и
ifKp _ ifKi _ if).
Насыщение должно быть наложено, когда вектор напряжения статора превышает предел фазы напряжения Vph_max:
где vd и vq - напряжения d-оси и q-оси соответственно.
В случае приоритизации осей вводятся напряжения v1 и v2, где:
v1 = vd и v2 = vq для определения приоритетов d-оси.
v1 = vq и v2 = vd для приоритизации по оси q.
Ограниченные (насыщенные) напряжения и получают следующим образом:
Vph _ max),
и
V2 _ max),
где:
и являются неограниченными (ненасыщенными) напряжениями.
v2_max - максимальное значение v2, не превышающее предела фазы напряжения, заданного v1sat) 2.
В случае, когда прямая и квадратурная оси имеют одинаковый приоритет (эквивалент d-q), ограниченные напряжения получают следующим образом:
Vd _ max),
и
Vq _ max),
где
vqunsat) 2,
и
vqunsat) 2.
Напряжение ограниченного (насыщенного) поля ограничено в соответствии с максимально допустимым значением:
Vf _ max),
где:
- неограниченное (ненасыщенное) напряжение поля.
Vf_max - максимально допустимое напряжение поля.
Для предотвращения насыщения выходного сигнала интегратора используется противообмоточный механизм. В такой ситуации выигрыш интегратора становится следующим:
vdunsat),
vqunsat),
и
vfunsat),
где Kaw_id, Kaw_iq и Kaw_if - коэффициенты усиления против витков для контроллеров d-оси, q-оси и поля соответственно.
Модель установки для прямой и квадратурной оси может быть аппроксимирована системой первого порядка.
Это решение управления используется только для синхронных двигателей с синусоидальным распределением потока и обмотками возбуждения.
[1] Миргнер, М. и В. Хакманн. «Проблемы управления синхронной машиной с внешним возбуждением в приложении автомобильного тягового привода». Emobility-Electric Power Train, 2006, стр. 1-6.




