Генератор опорного тока синхронной машины
Управление Simscape/Electrical/Control/SM
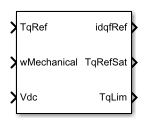
Блок SM Current Reference Generator реализует генератор тока для управления током синхронной машины (SM) в опорной системе d-q ротора.
Блок генератора опорных токов ПЛ может получить текущий опорный ток одним из следующих способов:
Управление нулевой d-осью (ZDAC).
Таблицы подстановки.
Для метода ZDAC блочные наборы:
Привязка тока d-оси к нулю:
0,
Привязка тока поля с использованием привязки крутящего момента:
max 'Tmax,
где если, max - максимальный ток поля, а Tmax - максимальный крутящий момент.
Привязка тока q-оси с использованием уравнения крутящего момента:
,
где Tref - опорный входной крутящий момент, а Kt - постоянная крутящего момента синхронной машины, выраженная упрощенным уравнением крутящего момента Ktifiq.
Для работы ниже базовой скорости синхронной машины подходящим способом является ZDAC. Выше базовой скорости для регулировки опорного значения d-оси требуется контроллер ослабления поля.
Чтобы предварительно создать текущие ссылки для нескольких операционных точек, определите три таблицы подстановки, используя подход таблиц подстановки:
vdc),
vdc),
и
vdc).
[1] Жирардин, А. и Г. Фридрих. «Оптимальное управление генератором синхронного стартера намотанного ротора». Конференция по промышленному применению, 2006 год, стр. 14-19.
[2] Карпьюк, С., К. Лазар и Д. И. Патраску. «Оптимальное управление крутящим моментом синхронной машины с внешним возбуждением». Контрольно-инженерная и прикладная информатика, 14 (2), 2012, стр. 80-88.





