Синхронный регулятор машины с заглушкой
Управление Simscape/Electrical/Control/SM
Регулятор SM с блоком Droop реализует регулятор синхронной машины (SM) с характеристикой droop. Этот блок используется для регулирования или управления входом дросселя в первичный двигатель, приводящий в действие синхронный генератор.
Блок использует погрешность между измеренной и требуемой скоростями генератора для установки положения дросселя первичного двигателя. Например, когда первичный двигатель вращается слишком медленно, дроссель открывается для увеличения энергии, поступающей в генератор, и увеличения его скорости.
При параллельном подключении нескольких генераторов с регуляторным приводом характеристики провала обеспечивают общую стабильность сети. Падение определяется как процентное изменение скорости от отсутствия нагрузки до полной нагрузки генератора. На этом рисунке показано соотношение скорость-нагрузка для регулятора с 5% doop.
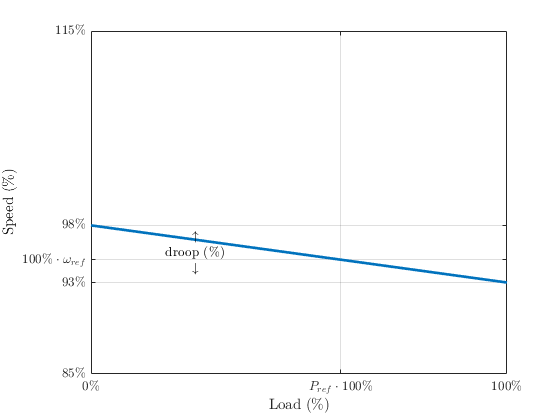
Здесь,
startref - опорная скорость регулятора. Задайте это значение как количество на единицу с помощью порта speed_ref.
Pref - эталонная нагрузка регулятора. Задайте это значение как количество на единицу с помощью порта P_ref.
droop - процент падения губернатора. Задайте это значение в процентах с помощью параметра Percention droop, (%).
Блок вычисляет положение эталонного дросселя, выраженное в единицах измерения, как:
− startref)
где λ - фактическая частота вращения генератора на единицу.
Инерция клапана вносит задержку между этим опорным положением дросселя и фактическим положением дросселя, которое моделируется как отставание первого порядка:
uthrottle, ref
Здесь Ts - постоянная времени. Задайте это значение с помощью константы времени регулятора, параметра.

