Концепции в этом разделе обеспечивают согласованный и общий язык для использования программных средств Simulink ®.
Система представляет собой группу взаимозависимых физических и функциональных частей с измеряемыми характеристиками, которые меняются с течением времени.
Например, транспортное средство представляет собой систему с несколькими частями. Измеряемые характеристики включают линейную скорость транспортного средства и скорость вращения колес.
Компонент системы является частью системы, которая взаимодействует с другими частями системы. Взаимодействие между компонентами определяет структуру и поведение системы.
Например, модуль круиз-контроля является компонентом системы в системе транспортного средства. Микроконтроллер и связанные с ним аппаратные средства определяют структуру, в то время как программный алгоритм для управления скоростью определяет поведение.

Модель - это математическое описание системы, полученное либо из физических законов, либо из экспериментальных данных. В описании обычно используется набор переменных с набором дифференциальных и дифференциальных уравнений, которые определяют отношения между переменными.
В следующем примере для транспортного средства: u(t) - сила (N), перемещающая транспортное средство вперед, v(t) - скорость (м/с), b - коэффициент сопротивления (Nׂׂ·s/m), и m - масса транспортного средства (кг).
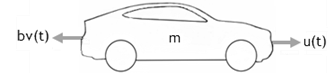
Транспортное средство представляет собой непрерывную систему. Для непрерывных систем дифференциальные уравнения описывают скорость изменения переменных с уравнениями, определенными для всех значений времени. Скорость транспортного средства v(t)и его ускорение v'(t) определяются следующим дифференциальным уравнением первого порядка.
![]()
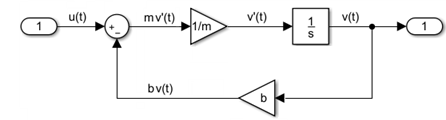
mv'(t) + bv(t) = u(t)
Модель Simulink для этого уравнения можно создать путем добавления блоков, задания поведения блоков и использования сигнальных линий для соединения блоков друг с другом. Следующая блок-схема Simulink реализует дифференциальное уравнение.
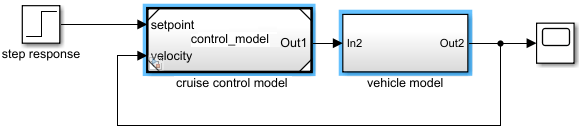
Компонент модели является частью модели, которая взаимодействует с другими деталями через интерфейс входов и выходов. Simulink реализует компоненты модели с использованием блоков «Подсистема» и «Модель». Блок модели ссылается на другую модель Simulink, сохраненную в отдельном файле.
В следующем примере управляющая модель была сохранена в файле модели Simulink. control_model.slx, а затем ссылка из блока модели во второй модели Simulink. Для моделирования механики транспортного средства был добавлен блок подсистемы.
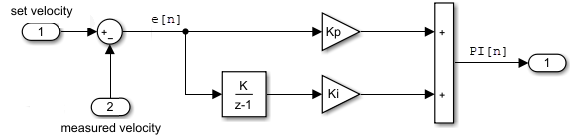
Обычно контроллеры строятся с дискретными системами, использующими компьютер для реализации алгоритма управления. Для дискретных систем дифференциальные уравнения описывают скорость изменения переменных, определенных только в определенные моменты времени. Например, управляющий сигнал для простого дискретного PI (пропорционально-интегрального) контроллера может быть определен следующим уравнением разности.
![]()
PI[n] = e[n]Kp + (e[n]+integral[n-1])Ki
Где e[n] - погрешность между сигналом, значение которого контролируется (скорость), и заданным значением (установленная скорость), Kp - постоянная пропорция, Ki является константой интегрирования, и n является временным шагом.
Следующая блок-схема Simulink реализует уравнение разности.
См. также: Моделирование непрерывной системы, Рекомендации по моделированию на основе компонентов, Создание пользовательской библиотеки, Основы ссылок на модель.
Некоторые системы уравнений содержат дополнительные ограничения, которые включают независимую переменную и вектор состояния в дополнение к дифференциальным уравнениям. Такие системы называются дифференциальными алгебраическими уравнениями (DAE),
Термин алгебраический относится к уравнениям, которые не включают никаких производных.
В моделях Simulink алгебраические петли являются алгебраическими ограничениями. Модели с алгебраическими петлями определяют систему дифференциальных алгебраических уравнений.
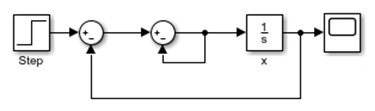
Например,
x '= x
0 = -x + u - 2x
- система дифференциальных алгебраических уравнений, реализованная в следующей модели Симулинка