Симулинк ®trim функция использует модель для определения стационарных точек динамической системы, удовлетворяющих заданным условиям ввода, вывода и состояния. Рассмотрим, например, эту модель, называемую ex_lmod.
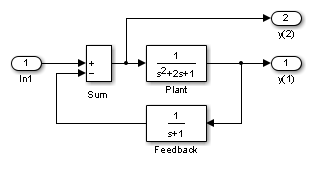
Вы можете использовать trim для поиска значений входного сигнала и состояний, которые устанавливают оба выходных сигнала в 1. Сначала сделайте начальные догадки для переменных состояния (x) и входные значения (u), затем установите требуемое значение для выхода (y).
x = [0; 0; 0]; u = 0; y = [1; 1];
Используйте индексные переменные, чтобы указать, какие переменные являются фиксированными, а какие могут отличаться.
ix = []; % Don't fix any of the states iu = []; % Don't fix the input iy = [1;2]; % Fix both output 1 and output 2
Призыв trim возвращает решение. Результаты могут отличаться из-за ошибки округления.
[x,u,y,dx] = trim('lmod',x,u,y,ix,iu,iy)
x =
0.0000
1.0000
1.0000
u =
2
y =
1.0000
1.0000
dx =
1.0e-015 *
-0.2220
-0.0227
0.3331
Следует отметить, что решение проблем равновесных точек может отсутствовать. Если это так, trim возвращает решение, которое минимизирует максимальное отклонение от требуемого результата после первой попытки установить производные в нуль. Для описания trim синтаксис, см. trim.
