PID-тюнер на основе частотного отклика моделирует модель для оценки частотных откликов установки на нескольких частотах вблизи полосы пропускания управления. Затем он использует расчетную частотную характеристику для настройки коэффициентов усиления в ПИД-контроллере. Этот тюнер является полезной альтернативой, когда PID-тюнер не может линеаризовать установку в рабочей точке, которую вы хотите использовать для настройки.
PID-тюнер на основе частотного отклика может настраивать параметры P, I, D и N в блоках PID-контроллера и PID-контроллера (2DOF) как за непрерывное время, так и за дискретное время. Для блоков контроллера PID (2DOF) тюнер не настраивает веса уставок b и c.
Подобно интерактивному PID-тюнеру, PID-тюнер на основе частотного отклика рассматривает установку как все блоки в цикле между выходом блока PID-контроллера и входом. ПИД-тюнер на основе частотного отклика выполняет эксперимент по возмущению для оценки частотной характеристики установки с разомкнутым контуром. Для этого тюнер выполняет следующие действия:
Разрывает контур обратной связи на выходе контроллера и моделирует модель, подавая на установку сигналы возмущения. К возмущениям относятся синусоидальные сигналы на частотах [1/3,1,3,10] λ c , где startc - целевая полоса пропускания, заданная для настройки. Если растение является асимптотически стабильным, подаваемый сигнал также включает в себя ступенчатое возмущение.
Измеряет реакцию на возмущение на входе контроллера.
Использует полученные данные для оценки частотной характеристики установки на четырех частотах. Для асимптотически стабильных растений тюнер также использует ответ на ступенчатое возмущение для оценки усиления постоянного тока установки.
Использует расчетную частотную характеристику для вычисления коэффициентов усиления PID, уравновешивающих производительность и надежность.
Если модель включает возмущения, тюнер может выполнить два моделирования: моделирование без возмущений для получения ответа базовой линии и моделирование с возмущениями, примененными к установке. Затем тюнер использует разницу между двумя ответами для устранения эффектов возмущений в модели. В этом случае оценочный частотный отклик, используемый для настройки, основан на этом безаварийном отклике.
Для открытия тюнера PID на основе частотного отклика в диалоговом окне блока PID Controller в раскрывающемся списке Select Tuning Method выберите Frequency Response Based.
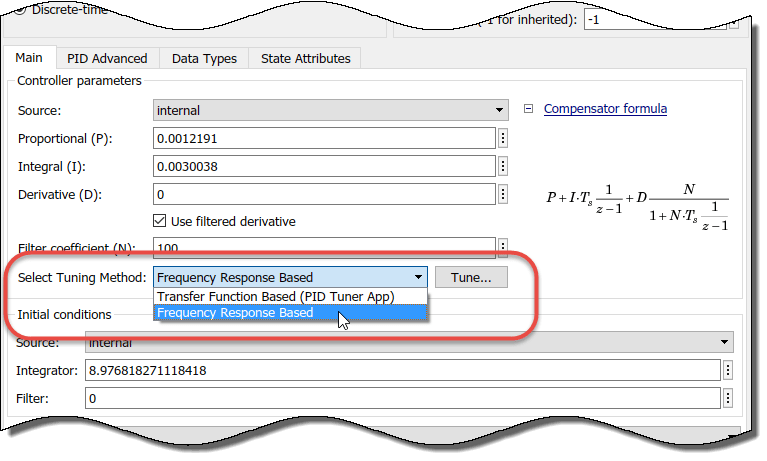
Нажмите кнопку Настроить. Откроется тюнер PID на основе частотного отклика. Тюнер считывает некоторые параметры из блока контроллера PID. Эти параметры включают в себя:
Тип контроллера (например, PI, PD или PID)
Форма контроллера (параллельная или идеальная)
Временная область контроллера (непрерывное время или дискретное время)
Время выборки контроллера
В ПИД-тюнере на основе частотного отклика настраиваются настройки для эксперимента оценки и цели настройки.

В разделе Настройки эксперимента (Experiment Settings) задаются параметры, управляющие экспериментом оценки частотного отклика. Для получения дополнительных сведений об этих параметрах нажмите кнопку Справка.
Укажите, следует ли выполнять два моделирования (по умолчанию) или один. Если модель включает возмущения, которые могут повлиять на результат эксперимента по оценке частотного отклика, выберите 2 моделирования (удаление возмущений). При выборе этой опции тюнер выполняет моделирование базовой линии и вычитает результирующую частотную характеристику из моделирования возмущений, чтобы устранить эффекты возмущений. Если модель не содержит таких возмущений, пропустите моделирование базовой линии, выбрав 1 моделирование.
Укажите, является ли установка асимптотически стабильной или имеет один интегратор. Если растение является асимптотически стабильным, эксперимент оценки включает оценку усиления постоянного тока растения. PID-тюнер на основе частотного отклика выполняет эту оценку путем ввода ступенчатого сигнала в установку.
Внимание
Не используйте PID-тюнер на основе частотного отклика с нестабильной установкой или установкой, содержащей несколько интеграторов.
Укажите время начала эксперимента в поле Время начала (t0). Начать эксперимент, когда установка находится в требуемой рабочей точке равновесия. Например, если известно, что моделирование должно выполняться до 10 с для достижения заводом такой рабочей точки, укажите время начала 10.
Укажите длительность эксперимента в поле Длительность (tspan). Пусть эксперимент выполняется достаточно долго для того, чтобы алгоритм оценки частоты-отклика собрал достаточные данные для хорошей оценки на всех частотах, которые он зондирует. Консервативная оценка длительности эксперимента - 100/λ c, где startc - заданная целевая полоса пропускания для настройки.
Задайте амплитуды возмущений. Во время эксперимента по настройке PID-тюнер на основе частотного отклика вводит синусоидальный сигнал в установку на четырех частотах, [1/3,1,3,10 ] Используйте поле синусоидальных амплитуд (Asin), чтобы задать амплитуды этих введенных сигналов. Можно задать скалярное значение, чтобы ввести одинаковую амплитуду на каждой частоте, или вектор длиной 4, чтобы задать различные амплитуды для каждой.
В типичной установке с типичной целевой полосой пропускания величины откликов установки на частотах эксперимента не варьируют в широких пределах. В таких случаях можно использовать скалярное значение, чтобы применить одно и то же возмущение величины на всех частотах. Однако, если известно, что отклик резко затухает в диапазоне частот, рассмотрите возможность уменьшения амплитуды низкочастотных входов и увеличения амплитуды высокочастотных входов. Количественно лучше для оценочного эксперимента, когда все реакции растений имеют сопоставимые величины.
Амплитуды возмущений должны быть:
Достаточно большой, чтобы возмущение преодолело любой диапазон нечувствительности в приводе установки и генерировало отклик выше уровня шума
Достаточно мало для поддержания работы установки в пределах приблизительно линейной области вблизи номинальной рабочей точки и во избежание насыщения вводимой или выводимой мощности установки
В эксперименте синусоидальные сигналы накладываются (со ступенчатым возмущением, если оно имеется, в случае настройки с разомкнутым контуром). Таким образом, возмущение может быть, по меньшей мере, равно сумме всех амплитуд. Поэтому для получения соответствующих значений амплитуд рассмотрим:
Пределы привода. Убедитесь, что наибольшее возможное возмущение находится в пределах диапазона привода установки. Насыщение исполнительного механизма может привести к ошибкам в расчетной частотной характеристике.
Насколько изменяется отклик установки в ответ на заданный вход привода в номинальной рабочей точке для настройки. Например, предположим, что вы настраиваете PID-контроллер, используемый в управлении частотой вращения двигателя. Вы определили, что на частотах вокруг целевой полосы частот изменение угла дроссельной заслонки на 1 ° вызывает изменение частоты вращения двигателя примерно на 200 об/мин. Предположим далее, что для сохранения линейной производительности скорость не должна отклоняться более чем на 100 об/мин от номинальной рабочей точки. В этом случае выберите амплитуды, чтобы гарантировать, что сигнал возмущения не превышает 0,5 (при условии, что это значение находится в пределах исполнительного механизма ).
Если ваше растение асимптотически стабильно, укажите амплитуду ступенчатого возмущения в поле Ступенчатые амплитуды (Astep). Соображения выбора амплитуды шага аналогичны соображениям задания амплитуд шага.
В разделе «Проектные спецификации» диалогового окна указываются цели настройки PID.
Укажите целевую полосу пропускания в поле Целевая полоса пропускания (рад/сек). Целевая полоса пропускания является целевым значением для частоты пересечения 0-dB усиления настроенного отклика CP с разомкнутым контуром, где P - отклик установки, а C - отклик контроллера. Эта частота пересечения приблизительно задает полосу пропускания управления. Для желаемого времени нарастания, для целевой полосы пропускания хорошее предположение - 2/
В поле Целевой запас по фазе (градусы) укажите целевой минимальный запас по фазе для настроенного отклика с разомкнутым контуром на перекрестной частоте. Целевой запас фазы отражает требуемую надежность настроенной системы. Обычно выбирают значение в диапазоне около 45 ° - 60 °. В целом, более высокий запас по фазе улучшает превышение, но может ограничить скорость отклика. Значение по умолчанию, 60 °, стремится сбалансировать производительность и надежность, давая около 5-10% превышения, в зависимости от характеристик вашего завода.
Для получения дополнительных сведений об этих параметрах нажмите кнопку Справка.
Нажмите кнопку Tune, чтобы начать эксперимент по оценке частотного отклика. Во время выполнения эксперимента по оценке тюнер:
Закрытие открытого блока контроллера PID.
Очистка всех предыдущих результатов настройки, отображаемых в диалоговом окне тюнера.
Замена блока контроллера PID в модели неназванной подсистемой.
Примечание
Когда эксперимент оценки завершен или отменен, тюнер восстанавливает блок контроллера PID. Этот процесс может привести к некоторому смещению сигнальных проводов на холсте модели и приведению модели Simulink ® в состояние с несохраненными изменениями.
Когда эксперимент оценки завершается, тюнер вычисляет новые коэффициенты усиления PID и отображает их в разделе «Результаты настройки» диалогового окна. (Для получения дополнительных сведений о результатах настройки нажмите кнопку «Справка».)
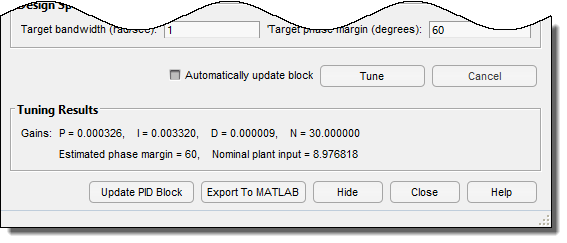
Если выбран блок автоматического обновления, тюнер PID на основе частотного отклика записывает новое увеличение PID в блок контроллера PID после завершения настройки. В противном случае нажмите «Обновить блок PID», чтобы записать настроенные коэффициенты усиления в блок. Моделирование модели для проверки настроенного выигрыша по отношению к полной нелинейной системе.
Пример, иллюстрирующий использование PID-тюнера на основе частотного отклика для настройки блока PID-контроллера в модели Simulink, которая не линеаризуется, см. в разделе Проектирование PID-контроллера с использованием частотного отклика завода вблизи полосы пропускания.
