В этом примере показано, как использовать PID-тюнер для импорта измеренных данных отклика для оценки установки.
При наличии программного обеспечения System Identification Toolbox™ можно использовать PID Tuner для оценки параметров линейной модели установки на основе данных ответа во временной области. Затем PID-тюнер настраивает PID-контроллер для результирующей оценочной модели. Данные отклика могут быть либо измерены из реальной системы, либо получены путем моделирования модели Simulink ®. Оценка растений особенно полезна, когда модель Simulink не может быть линеаризована или линеаризована до нуля. Для идентификации завода необходимо указать конечное значение времени остановки модели Simulink.
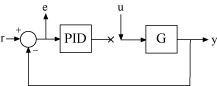
При импорте данных ответа PID-тюнер предполагает, что измеренные данные представляют установку, подключенную к PID-контроллеру в цикле отрицательной обратной связи. Другими словами, PID-тюнер предполагает следующую структуру системы. PID-тюнер предполагает, что вы ввели входной сигнал в u и измерил отклик системы на y, как показано.
Можно импортировать данные ответа, хранящиеся в рабочей области MATLAB ®, в виде числового массива, timeseries объект или iddata(Панель инструментов идентификации системы). Чтобы импортировать данные ответа:
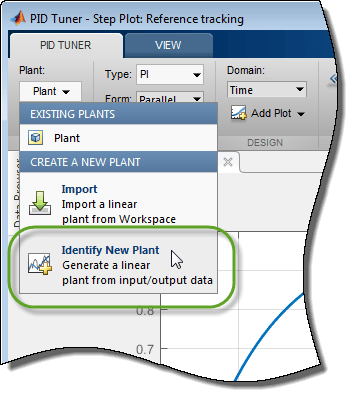
В PID Tuner на вкладке PID Tuner в меню Plant выберите Identify New Plant.
На закладке Идентификация завода щелкните![]() Получить данные ввода-вывода. Выберите тип измеренных данных отклика. Например, если вы измерили отклик завода на ввод шага, выберите Ответ шага (Step Response). Чтобы импортировать отклик системы на произвольный стимул, выберите Произвольные данные ввода-вывода.
Получить данные ввода-вывода. Выберите тип измеренных данных отклика. Например, если вы измерили отклик завода на ввод шага, выберите Ответ шага (Step Response). Чтобы импортировать отклик системы на произвольный стимул, выберите Произвольные данные ввода-вывода.
В диалоговом окне «Импорт ответа» введите сведения о данных ответа. Например, для данных ответа на шаг, хранящихся в переменной outputy и отбирают каждые 0,1 с:
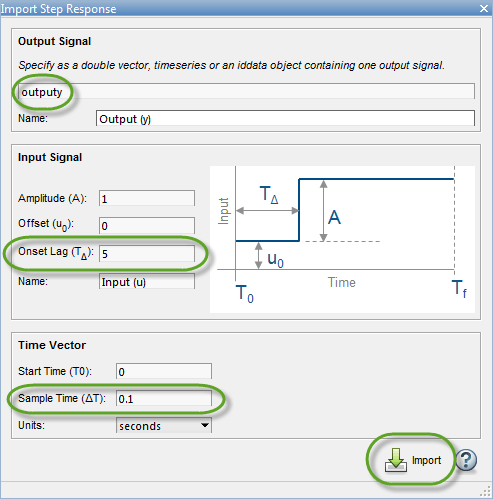
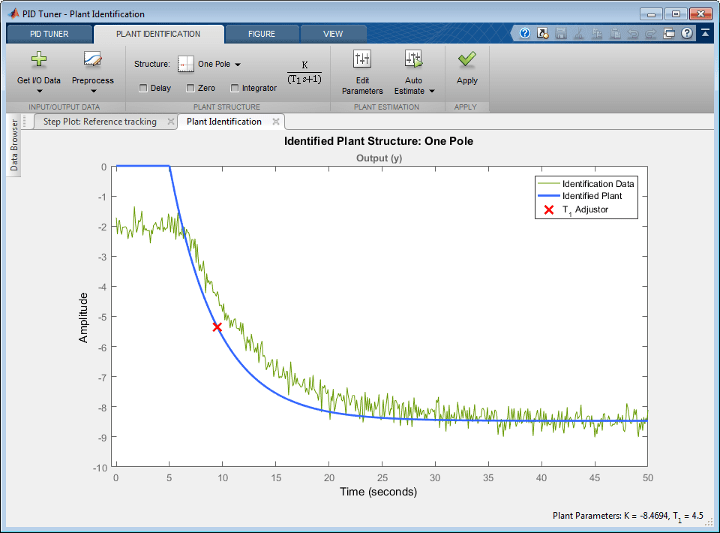
Щелкните![]() Импорт (Import). Откроется вкладка Идентификация завода (Plant Identification), на которой отображаются данные ответа и ответ начального расчетного завода.
Импорт (Import). Откроется вкладка Идентификация завода (Plant Identification), на которой отображаются данные ответа и ответ начального расчетного завода.
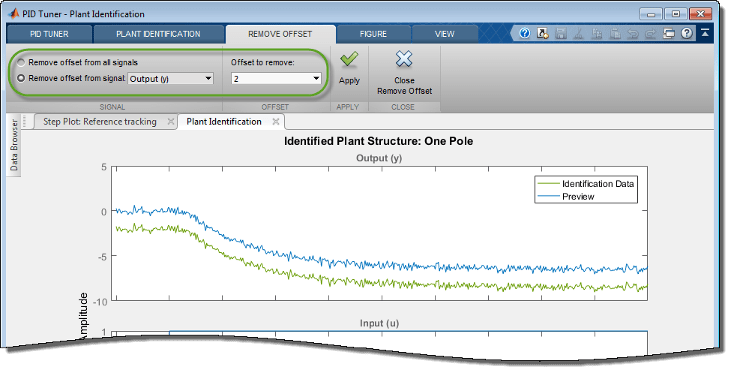
В зависимости от качества и особенностей данных ответа может потребоваться выполнить предварительную обработку данных для улучшения расчетных результатов завода. Меню Предварительный процесс предоставляет несколько опций для предварительной обработки данных ответа, таких как удаление смещений, фильтрация или извлечение подмножества данных. В частности, когда данные ответа имеют смещение, важно, чтобы хорошие результаты идентификации удаляли смещение.
На закладке Идентификация завода щелкните ![]() Предварительная обработка и выберите опцию предварительной обработки, которую необходимо использовать. Откроется вкладка с рисунком, на котором отображаются исходные и предварительно обработанные данные. Параметры на вкладке используются для задания параметров предварительной обработки.
Предварительная обработка и выберите опцию предварительной обработки, которую необходимо использовать. Откроется вкладка с рисунком, на котором отображаются исходные и предварительно обработанные данные. Параметры на вкладке используются для задания параметров предварительной обработки.
(Дополнительные сведения о параметрах предварительной обработки см. в разделе Данные предварительной обработки.)
Если предварительно обработанный сигнал удовлетворен, щелкните![]() Обновить (Update), чтобы сохранить изменения в сигнале. Нажмите для возврата
Обновить (Update), чтобы сохранить изменения в сигнале. Нажмите для возврата![]() на вкладку «Идентификация завода».
на вкладку «Идентификация завода».
PID Tuner автоматически корректирует параметры установки для создания нового начального предположения для установки на основе предварительно обработанного ответного сигнала.
Теперь можно скорректировать структуру и параметры расчетной установки для получения расчетной линейной модели установки для PID-настройки. Для получения дополнительной информации см. Интерактивная оценка установки на основе измеренных или смоделированных данных ответа.
