Во многих ситуациях динамическое представление системы, которой требуется управлять, недоступно. Одним из решений этой проблемы является получение динамической модели с использованием методов идентификации. Система возбуждается измеряемым сигналом, и соответствующий отклик системы собирается с некоторой частотой дискретизации. Полученные данные ввода-вывода затем используются для получения модели системы, такой как передаточная функция или модель пространства состояний. Этот процесс называется идентификацией или оценкой системы. Целью идентификации системы является выбор модели, которая обеспечивает наилучшее соответствие между измеренным откликом системы на конкретный вход и откликом модели на тот же вход.
При наличии модели системы управления Simulink ® вместо ее измерения можно моделировать входные/выходные данные. Процесс оценки одинаков. Реакция системы на некоторое известное возбуждение моделируется, и динамическая модель оценивается на основе полученных смоделированных входных/выходных данных.
Независимо от того, используются ли для оценки измеренные или смоделированные данные, после определения подходящей модели завода необходимо установить цели управления для завода на основе знаний о требуемом поведении системы, представляемой моделью завода. Затем вы проектируете контроллер обратной связи для достижения этих целей.
При наличии программного обеспечения System Identification Toolbox™ можно использовать PID Tuner как для идентификации установки, так и для проектирования контроллера в одном интерфейсе. Можно импортировать входные/выходные данные и использовать их для идентификации одной или нескольких моделей завода. Кроме того, можно получить смоделированные входные/выходные данные из модели Simulink и использовать их для идентификации одной или нескольких моделей завода. Затем с помощью этих установок можно спроектировать и проверить контроллеры МТС. PID Tuner также позволяет непосредственно импортировать модели завода, например, полученные из задачи независимой идентификации.
Обзор идентификации системы см. в разделе Сведения об идентификации системы (панель инструментов идентификации системы).
Динамическое поведение многих систем может быть адекватно описано линейной зависимостью между входом и выходом системы. Даже когда поведение становится нелинейным в некоторых операционных режимах, часто существуют режимы, в которых динамика системы является линейной. Например, поведение операционного усилителя или динамика подъемной силы и силы аэродинамических тел может быть описано линейными моделями в пределах определенного ограниченного рабочего диапазона входных сигналов. Для такой системы можно выполнить эксперимент (или моделирование), который возбуждает систему только в ее линейном диапазоне поведения и собирает входные/выходные данные. Затем можно использовать данные для оценки линейной модели завода и проектирования PID-контроллера для линейной модели.
В других случаях эффекты нелинейности невелики. В таком случае линейная модель может обеспечить хорошую аппроксимацию, так что нелинейные отклонения рассматриваются как возмущения. Такие аппроксимации в значительной степени зависят от входного профиля, амплитуды и частотного содержания сигнала возбуждения.
Линейные модели часто описывают отклонение отклика системы от некоторой точки равновесия, обусловленное небольшими возмущающими входами. Рассмотрим нелинейную систему, выход которой, y (t), следует заданной траектории в ответ на известный вход, u (t). Динамика описывается по dx (t )/dt = f (x, u), y = g (x, u). Здесь x - вектор внутренних состояний системы, а y - вектор выходных переменных. Функции f и g, которые могут быть нелинейными, являются математическими описаниями системы и динамики измерений. Предположим, что когда система находится в состоянии равновесия, малое возмущение на входе, Δu, приводит к малому возмущению на выходе, Δy:
Например, рассмотрим систему следующей блок-схемы Simulink:
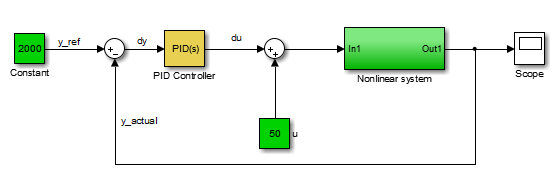
При работе в безаварийной среде номинальный вход величины 50 удерживает установку по ее постоянной траектории величины 2000. Любые нарушения могут привести к отклонению установки от этого значения. Задача PID контроллера состоит в добавлении небольшой коррекции к входному сигналу, которая возвращает систему к ее номинальному значению в течение разумного периода времени. Таким образом, ПИД-контроллер должен работать только над динамикой линейного отклонения, даже если сама установка может быть нелинейной. Таким образом, можно добиться эффективного управления нелинейной системой в некоторых режимах, разработав ПИД-контроллер для линейной аппроксимации системы в условиях равновесия.
Общим примером использования является проектирование ПИД-контроллеров для стационарной работы производственных установок. На этих заводах часто требуется модель, относящаяся к влиянию измеряемой входной переменной на выходное количество, в виде установки SISO. Общая система может быть MIMO по своей природе, но эксперименты или моделирование осуществляются таким образом, что позволяет измерять инкрементное влияние одной входной переменной на выбранный выход. Данные могут быть достаточно шумными, но так как ожидание - контролировать только доминирующую динамику, часто достаточно модели растения низкого порядка. Такой прокси получают путем сбора или моделирования входных-выходных данных и получения из них модели процесса (передаточной функции низкого порядка с неизвестной задержкой). Сигнал возбуждения для получения данных часто может быть простым искривлением значения выбранной входной переменной.
В PID Tuner можно идентифицировать только модели завода с одним входом, одним выходом и непрерывным временем. Кроме того, тюнер PID не может выполнять следующие задачи идентификации системы:
Определите передаточные функции произвольного числа полюсов и нулей. (PID-тюнер может идентифицировать передаточные функции до трех полюсов и одного нуля, а также интегратор и временную задержку. PID-тюнер может идентифицировать модели пространства состояний произвольного порядка.)
Оцените компонент возмущения модели, который может быть полезен для отделения измеренной динамики от динамики шума.
Проверка оценки путем сравнения ответа завода с независимым набором данных.
Выполните остаточный анализ.
Если вам нужны эти расширенные функции идентификации, импортируйте данные в приложение System Identification (System Identification Toolbox). Используйте приложение System Identification для идентификации модели и экспорта идентифицированной модели в рабочую область MATLAB ®. Затем импортируйте идентифицированную модель в PID-тюнер для проектирования PID-контроллера.
Дополнительные сведения о средстве идентификации системы см. в разделе Идентификация линейных моделей с помощью приложения идентификации системы (панель инструментов идентификации системы).
Идентификация системы (панель инструментов идентификации системы)
