Ограничение превышения в отклике шага от указанных входов к указанным выходам при использовании тюнера системы управления.
Цель переполнения ограничивает превышение в отклике шага между указанными местоположениями сигнала. Ограничение выполняется, когда превышение в настроенном ответе меньше целевого превышения
Программное обеспечение отображает максимальное превышение на ограничение пикового усиления, предполагая характеристики системы второго порядка. Поэтому для настройки систем более высокого порядка ограничение переполнения является только приблизительным. Кроме того, Overshoot Goal не может надежно снизить превышение ниже 5%.
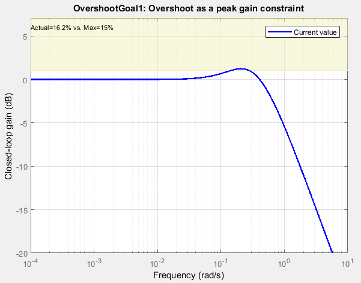
При создании цели настройки в настройщике системы управления создается график цели настройки. Затененная область на графике представляет область в частотной области, где цель настройки не удовлетворена.
На вкладке «Настройка» окна «Настройка системы управления» выберите «Новая цель» > «Максимальное превышение» для создания цели «Превышение».
При настройке систем управления в командной строке используйте TuningGoal.Overshoot для указания цели ответа на шаг.
Этот раздел диалогового окна используется для задания точек ввода, вывода и открытия цикла для оценки цели настройки.
Укажите вводы «шаг-ответ»
Выберите одно или несколько расположений сигнала в модели, в которых следует применить ввод шага. Чтобы ограничить отклик SISO, выберите однозначный входной сигнал. Например, чтобы ограничить ответ на шаг из расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'u'. Чтобы ограничить MIMO-отклик, выберите несколько сигналов или сигнал с векторным значением.
Укажите выходные данные пошагового ответа
Выберите одно или несколько расположений сигнала в модели, в которых будет измеряться отклик на ввод шага. Чтобы ограничить отклик SISO, выберите выходной сигнал с одним значением. Например, чтобы ограничить ответ на шаг из расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'y'. Чтобы ограничить MIMO-отклик, выберите несколько сигналов или сигнал с векторным значением. Для систем MIMO количество выходов должно равняться количеству входов.
Оценка переполнения с открытием следующих контуров
Выберите одно или несколько расположений сигналов в модели, в которых следует открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается по конфигурации с разомкнутым контуром, созданной путем открытия контуров обратной связи в определенных местоположениях. Например, чтобы оценить цель настройки с помощью проема в месте с именем 'x', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в модели Simulink ®, щелкните значок![]() . Чтобы удалить сигнал из списка ввода или вывода, щелкните значок.
. Чтобы удалить сигнал из списка ввода или вывода, щелкните значок. ![]() После выбора нескольких сигналов их можно переупорядочить с помощью
После выбора нескольких сигналов их можно переупорядочить с помощью![]() и.
и. ![]() Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Этот раздел диалогового окна используется для указания дополнительных характеристик цели превышения.
Ограничить превышение% до
Введите максимальный процент превышения. Цель превышения не может надежно снизить превышение ниже 5%
Настройка амплитуды шага
Для цели настройки MIMO, когда выбор единиц приводит к смешиванию малых и больших сигналов в разных каналах отклика, эта опция позволяет задать относительную амплитуду каждой записи на входе шага с векторными значениями. Эта информация используется для масштабирования внедиагональных терминов в передаточной функции от ссылки до ошибки отслеживания. Такое масштабирование обеспечивает измерение кросс-соединений относительно амплитуды каждого опорного сигнала.
Например, предположим, что целью настройки является вывод 'y1' and 'y2' опорные сигналы пути 'r1'and 'r2'. Предположим далее, что выходные данные необходимы для отслеживания привязок с перекрестной связью менее 10%. Если r1 и r2 иметь сопоставимые амплитуды, то достаточно сохранить коэффициенты усиления от r1 кому y2 и r2 и y1 ниже 0,1. Однако, если r1 в 100 раз больше, чем r2, выигрыш от r1 кому y2 должно быть меньше 0,001 для обеспечения того, чтобы r1 изменения y2 менее чем на 10% от r2 цель. Для обеспечения этого результата установите Adjust for step amplitude на Yes. Затем введите [100,1] в текстовом поле «Амплитуды команд шага». Это предписывает тюнеру системы управления принимать во внимание, что первый опорный сигнал в 100 раз больше, чем второй опорный сигнал.
Значение по умолчанию, No , означает, что масштабирование не применяется.
Применить цель к
Эта опция используется при настройке сразу нескольких моделей, например массива моделей, полученных линеаризацией модели Simulink в различных рабочих точках или значениями параметров блока. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Только модели (Only Models). Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что необходимо применить цель настройки ко второй, третьей и четвертой моделям в массиве модели. Для ограничения применения требования введите 2:4 в текстовом поле «Только модели».
Дополнительные сведения о настройке для нескольких моделей см. в разделе Подходы к надежной настройке (инструментарий надежного управления).
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если цель настройки является жестким ограничением.
Для цели Overshoot, f (x) отражает относительное удовлетворение или нарушение цели. Процентное отклонение от f (x) = 1 приблизительно соответствует процентному отклонению от указанной цели превышения. Например, f (x) = 1,2 означает, что фактическое превышение превышает целевой показатель приблизительно на 20%, а f (x) = 0,8 означает, что фактическое превышение приблизительно на 20% меньше целевого показателя.
Overshoot Goal использует T‖∞ в качестве прокси для overshoot, основываясь на характеристиках модели второго порядка. Здесь T - функция переноса с замкнутым контуром, ограниченная требованием. Перегрузка настраивается в диапазоне от 5% T‖∞ = 1) до 100% T‖∞). Цель Overshoot неэффективна при форсировании превышения ниже 5%.
Эта цель настройки также накладывает неявное ограничение стабильности на функцию передачи с замкнутым контуром между указанными входами и выходами, вычисляемое с помощью циклов, открытых в указанных местоположениях открытия контура. Динамика, на которую влияет это неявное ограничение, является стабилизированной динамикой для этой цели настройки. Опции Минимальная скорость затухания (Minimum decay rate) и Максимальная собственная настройка частоты (Maximum natural frequency) управляют нижней и верхней границами этой неявно ограниченной динамики. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию противоречат другим требованиям, на вкладке Настройка (Tuning) воспользуйтесь опциями настройки для изменения значений по умолчанию.
