Средства надежного управления Toolbox™ настройки, systune и Тюнер системы управления, позволяют настроить системы управления на устойчивость к изменениям растений. Можно настроить контроллеры для учета неопределенности физических параметров.
Можно также настроить системы управления для обеспечения производительности в различных рабочих условиях. Настройку многомоделей можно использовать для обеспечения надежного управления несколькими конфигурациями системы, например, различными режимами отказа системы. При настройке для нескольких моделей программа ищет значения параметров контроллера, которые наилучшим образом удовлетворяют указанным целям настройки для всех моделей завода.
Выбор подхода к надежной настройке зависит от системных вариаций приложения. Эти подходы обобщаются в следующей таблице.
| Сценарий надежной настройки | Подход |
|---|---|
| Система управления настройкой на устойчивость к неопределенности параметров, такая как система масса-пружина-демпфер, в которой постоянная пружины и коэффициент демпфирования являются неопределенными. | Моделирование неопределенных значений параметров с помощью ureal блоки. См. раздел Настройка для неопределенности параметров. |
| Настройка системы управления фиксированной структурой на устойчивость к реальной и сложной неопределенности параметров и динамической неопределенности | Моделирование неопределенных параметров с помощью ureal, ucomplex, и ultidyn блоки. Модель перестраиваемых компонентов системы управления с блоками проектирования управления, такими как tunableGain и tunablePID блоки. Использовать musyn настройка системы управления для оптимизации надежной производительности H∞. |
| Настроить систему управления на несколько критических значений параметров установки. | Одновременно настройте несколько моделей, соответствующих значениям параметров. Этот подход полезен, когда невозможно смоделировать вариации завода как ureal блоки. См. раздел Настройка вариантов параметров. |
| Одновременная настройка нескольких моделей, полученных в различных рабочих точках или представляющих различные конфигурации системы. Настройка по нескольким моделям растений. |
Физические параметры системы часто являются неопределенными по различным причинам, включая неточные измерения, производственные допуски или износ. Вы можете использовать тюнер системы управления или systune команду на настройку систем управления на устойчивость к реальной неопределенности параметров на установке. Вы представляете неопределенность параметров в модели системы управления с использованием неопределенных реальных параметров ureal. Программное обеспечение автоматически находит наихудшие комбинации значений параметров и настраивает контроллер для максимизации производительности в диапазоне неопределенности параметров.
Надежная настройка на неопределенность параметров также полезна, чтобы избежать «чрезмерной настройки» системы управления. Когда вы настраиваетесь на одну установку, программное обеспечение может оптимизировать производительность за счет надежности. Можно получить конструкцию, которая максимально повышает производительность, но не очень устойчива к изменениям в установке. Определение некоторой степени изменчивости установки позволяет программному обеспечению настройки избегать таких хрупких конструкций и достигать надежных рабочих характеристик, часто с незначительным ухудшением номинальных рабочих характеристик.
Чтобы настроить модель системы управления Simulink ® для надежной настройки, используйте линеаризацию с подстановкой блоков. (Требуется программное обеспечение Simulink Control Design™.) Используйте блоки усиления для моделирования параметров установки и подстановку блоков для замены их неопределенными значениями, представленными ureal объекты. Или замените всю подсистему неопределенной моделью состояния-пространства (uss) подсистемы. Дополнительные сведения см. в разделе Неопределенность модели в Simulink для надежной настройки.
Как и в случае систем управления, моделируемых в MATLAB ®, программное обеспечение автоматически настраивает модель на наихудшую комбинацию значений параметров в пределах диапазона неопределенности .
Для представления реальной неопределенности параметров в установке построить обобщенное состояние-пространство (genss) модель системы управления с использованием ureal блоки. Использовать контрольные блоки проектирования, такие как tunablePID или tunableTF для представления перестраиваемых элементов контроллера в модели. (См. раздел Модель настраиваемой системы управления с неопределенными параметрами.) Настройка модели с помощью systune или в настройщике системы управления точно так же, как для настраиваемой модели системы управления без неопределенности.
Командная строка: Использовать genss модель в качестве первого входного аргумента для systune. Подробный пример см. в разделе Надежная настройка системы позиционирования.
Настройка системы управления: импортируйте модель в приложение, выбрав Изменить архитектуру > Обобщенная конфигурация обратной связи и введя имя genss модель в текстовое поле. Затем используйте приложение точно так же, как для модели системы управления без неопределенности.
В обоих случаях при настройке модели программа автоматически настраивает настраиваемые компоненты для оптимизации производительности во всем диапазоне неопределенности. Графики анализа автоматически отображают случайные выборки неопределенной системы, чтобы дать визуальное представление об изменении производительности.
Блочно-замещающий подход к моделированию неопределенности требует замены всего блока модели на ureal параметр или uss неопределенная система. В некоторых случаях такая замена может оказаться невозможной. В качестве альтернативы можно изменять системные параметры в указанном диапазоне, сетке или неравномерном наборе значений. При использовании systune или Control System Tuner для настройки системы с изменением параметров, вы можете получить контроллер, который надежно соответствует целям производительности в диапазоне значений коэффициентов модели или в нескольких конфигурациях установки.
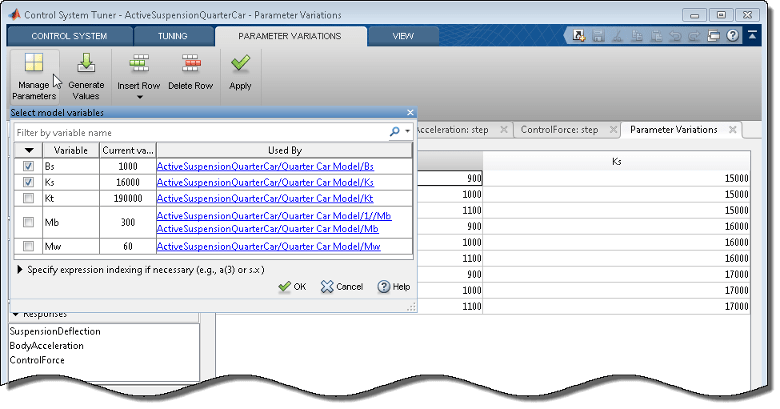
В окне «Настройка системы управления» укажите варианты параметров блока на вкладке «Система управления». В раскрывающемся списке «Вариации параметров» выберите Select parameters to vary. Это действие открывает вкладку Вариации параметров (Parameter Variations), на которой можно указать изменяемые параметры блока и их значения. Модуль настройки системы управления линеаризует модель Simulink при каждой комбинации значений параметров блока. Затем приложение находит набор преимуществ контроллера, который наилучшим образом соответствует вашим целям настройки для всех линеаризованных моделей одновременно.
Подробный пример настройки системы управления для нескольких значений параметров блока см. в разделе Настройка нескольких значений параметров установки.
Дополнительные сведения об использовании вкладки Вариации параметров (Parameter Variations) для создания линейных моделей с несколькими значениями параметров блока см. в разделе Задание образцов параметров для пакетной линеаризации (Simulink Control Design). Процедура применения изменения параметров в линеаризаторе модели аналогична процедуре в тюнере системы управления.
slTunerДля настройки командной строки системы управления, смоделированной в Simulink, используйте функцию изменения параметров slTuner. Для этого создается структура, содержащая сетку «параметр-значение», по которой требуется настроить модель. Для примера, иллюстрирующего изменение параметра с помощью slLinearizer, см. раздел Изменение значений параметров и получение нескольких передаточных функций (Simulink Control Design). Процедура конфигурирования slTuner интерфейс для вариаций параметров одинаков. После настройки slTuner интерфейс, создание целей настройки и настройка интерфейса с systune. Программное обеспечение настраивает систему в соответствии с целями настройки для всех значений параметров одновременно.
Параметры блоков, изменяемые для создания нескольких моделей растений, отличаются от параметров контроллера, настроенных для достижения целей настройки.
Параметры блока - это значения, определяющие атрибуты блоков в модели Simulink. Параметры блока могут задавать числовые значения, такие как коэффициент усиления блока усиления, пружинную постоянную или другие физические параметры системы. Параметры блока могут также определять структурные атрибуты блока, например размеры таблицы подстановки.
Можно изменять любой параметр блока, значение которого хранится в качестве переменной в рабочей области модели или в рабочей области MATLAB. Однако не изменяйте параметры блока контроллера, назначенные для настройки (см. раздел Задание блоков для настройки в настройщике системы управления). Скорее, варьируйте параметры, определяющие атрибуты завода в системе управления. Например, в модели ActiveSuspensionQuarterCar, параметры блока, указанные как переменные, включают в себя пружинную константу, Ksи постоянной демпфирования, Bs.
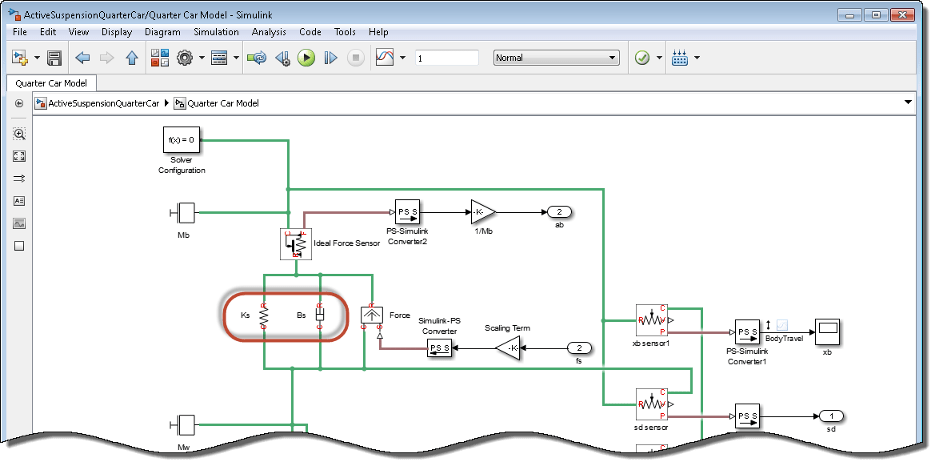
Пример Настройка для нескольких значений параметров завода показывает, как настроить систему управления ActiveSuspensionQuarterCar модель для диапазона значений этих параметров.
Параметры контроллера - это коэффициенты, которые настраиваются программным обеспечением настройки для обеспечения производительности системы управления, соответствующей вашим целям настройки. При выборе блоков для настройки программа назначает параметризацию каждому блоку, как описано в разделе «Просмотр и изменение параметризации блока в настройщике системы управления». Коэффициенты этих параметризаций являются параметрами контроллера, настраиваемыми программным обеспечением. Например, при выборе блока PID Controller для настройки программа настройки назначает параметризацию, настраиваемые коэффициенты которой являются коэффициентами усиления PID и постоянной фильтра.
Таким образом, параметры контроллера задаются путем выбора блоков для настройки и дополнительной настройки параметров этих блоков. Для получения нескольких моделей завода для настройки задаются другие параметры системы, которые необходимо изменить. В примере «Настройка для нескольких значений параметров установки» блок, выбранный для настройки, является блоком «State-Space». В этом примере параметры контроллера являются записями в матрицах состояния-пространства.
Когда вы настраиваете выигрыш контроллера на несколько моделей, программное обеспечение ищет значения параметров контроллера, которые наилучшим образом удовлетворяют указанным целям настройки для всех моделей завода. Это полезно для обеспечения надежной производительности в различных рабочих условиях или для нескольких конфигураций системы.
Тюнер системы управления может настраивать параметры контроллера для линеаризации модели Simulink, полученной в любое время снимка моделирования или в установившейся рабочей точке. На вкладке «Система управления» используйте меню «Операционная точка» для вычисления и выбора рабочих точек для линеаризации и настройки.

Дополнительные сведения см. в разделе Определение рабочих точек для настройки настройки системы управления.
При указании нескольких рабочих точек модуль настройки системы управления пытается настроить параметры контроллера в соответствии с заданными целями настройки во всех указанных рабочих точках. Вы можете ограничить цели настройки, которые Tuner Control System обеспечивает в каждой операционной точке. См. раздел Выборочное применение целей настройки.
В командной строке можно настроить несколько операционных точек, передав массив объектов операционных точек в slTuner.
Можно настроить контроллер, который является надежным для нескольких конфигураций системы, построив массив моделей, представляющих эти условия. Например, можно создать массив genss модели, представляющие различные режимы отказа системы. В Simulink используйте slTuner для линеаризации модели в массиве рабочих условий, представляющих различные режимы отказа. Пример см. в разделе Модель в разделе Отказоустойчивое управление пассажирским реактивным самолетом. В этой модели используется блок усиления, который при установке в нуль разрывает контур обратной связи для моделирования потери управления исполнительным механизмом системы. Затем в примере используется slTuner для выборки модели с различными каналами этого блока усиления, установленными в нуль. Настройка slTuner с systune находит значения перестраиваемых параметров контроллера, оптимизирующих цели проектирования во всех режимах отказов.
Иногда требуется ограничить применение целей настройки подмножеством моделей, для которых выполняется одновременная настройка. Например, предположим, что линеаризация модели выполняется в четыре раза, t = [0,5,10,20]. Вы хотите настроить модель так, чтобы она соответствовала вашим целям конструирования в это время. Однако предположим далее, что у вас есть одна цель настройки, которую вы не хотите применять в t = 0 потому что он должен применяться только после перехода модели в устойчивое состояние. Чтобы ограничить применение этой цели настройки:
В командной строке установите Models свойство цели настройки для индексов массива моделей, к которым требуется применить цель.
В настройщике системы управления используйте поле Применить цель к цели настройки.
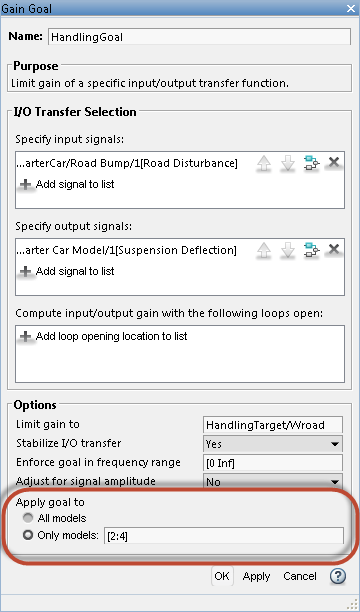
Выберите Только модели (Only models) и введите индексы массива моделей, для которых применяется цель. В этом примере линеаризация при t = [0,5,10,20] дает массив из четырех моделей, и требуется исключить первую модель из этого массива (t = 0) от цели настройки. Поэтому введите индексы массива 2:4.
Для нескольких моделей, полученных с помощью вкладки Вариации параметров (Parameter Variations), индексы массива назначаются в порядке отображения комбинаций параметров в таблице Вариации параметров (Parameter Variations). Например, если применить вариации параметров следующей иллюстрации, то индексы массива назначаются, как показано на рисунке.
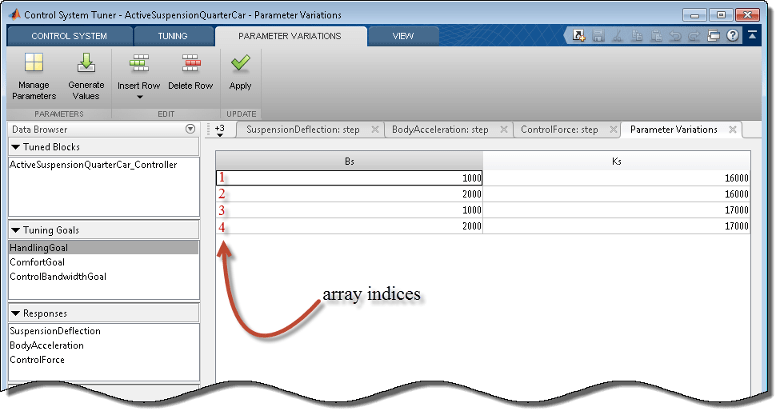
Таким образом, например, применить цель настройки только к тем моделям с Bs = 1000, независимо от Ks значение, введите [1,3] в поле Только модели цели настройки.
При выполнении надежной настройки системы с неопределенностью параметров иногда требуется применить определенные цели настройки только к номинальной системе. Или можно рассматривать цель настройки как жесткое ограничение для номинальной системы, но как мягкое ограничение для остального диапазона неопределенностей. При настройке системы управления, смоделированной в MATLAB, можно сделать это, поместив номинальную систему в массив модели с неопределенной системой. Например, предположим CL0 является genss модель, имеющая как неопределенные, так и настраиваемые блоки. Создайте массив модели номинальных и полных неопределенных систем.
CL = [getNominal(CL0),CL0];
Предположим, что вы создали две цели настройки для этой системы, Req1 и Req2. Хочешь Req2 применяется только к номинальной системе. Для этого используйте Models свойство для ограничения Req2 к первой записи в массиве.
Req2.Models = [1];
Теперь вы можете использовать Req2 как с systune как тяжелый гол или мягкий гол.
Рассматривать Req2 в качестве жесткого ограничения для номинальной системы и мягкого ограничения в противном случае создайте копию цели настройки. Чтобы ограничить копирование второй записью в массиве, установите значение Models свойство копии.
Req3 = Req2; Req3.Models = [2]; hard = [Req1,Req2]; soft = Req3; [CLt,fSoft,gHard] = systune(CL,soft,hard);
replaceBlock | systune (for genss) | slTuner (Simulink Control Design) | systune (for slTuner)(Проект управления Simulink)
