Ограничение динамики системы с замкнутым контуром, заданных контуров обратной связи или заданных конфигураций с разомкнутым контуром при использовании тюнера системы управления.
Poles Goal ограничивает динамику всей системы управления или определенных контуров обратной связи системы управления. Ограничение динамики контура обратной связи означает ограничение динамики функции чувствительности, измеренной в определенном месте в системе управления.
С помощью параметра «Цель полюсов» можно задать конечную минимальную скорость затухания или минимальное демпфирование полюсов в системе управления или в указанном контуре. Можно задать максимальную собственную частоту для этих полюсов, чтобы исключить быструю динамику в настроенной системе управления.
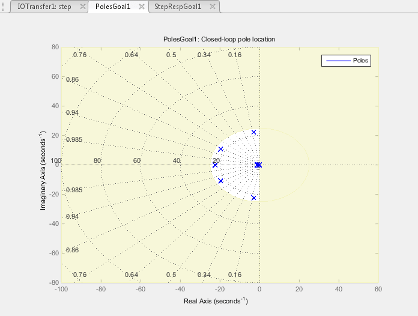
В настройщике системы управления затененная область на графике представляет область в частотной области, где ограничения местоположения полюсов не выполняются.
Чтобы ограничить динамику или обеспечить стабильность одного настраиваемого компонента системы управления, используйте Controller Poles Goal.
На вкладке «Настройка» окна «Настройка системы управления» выберите «Новая цель» > «Ограничение динамики замкнутого цикла» для создания цели «Полюса».
При настройке систем управления в командной строке используйте TuningGoal.Poles для указания цели отклонения возмущения.
Этот раздел диалогового окна используется для указания части системы управления, для которой требуется ограничить динамику. Можно также указать места открытия цикла для оценки цели настройки.
Вся система
Выберите эту опцию, чтобы ограничить расположение полюсов замкнутого контура системы управления.
Специальный контур (контуры) обратной связи
Выберите этот параметр, чтобы указать один или несколько контуров обратной связи для ограничения. Укажите контур обратной связи, выбрав местоположение сигнала в системе управления. Цель полюсов ограничивает динамику функции чувствительности, измеренной в этом месте. (см. getSensitivity для получения информации о функциях чувствительности.)
Чтобы ограничить динамику цикла SISO, выберите расположение с одним значением. Например, чтобы ограничить динамику функции чувствительности, измеренной в месте с именем 'y', нажмите ![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'y'. Чтобы ограничить динамику цикла MIMO, выберите несколько сигналов или сигнал с векторными значениями.
Вычислить полюса с разомкнутыми следующими контурами
Выберите одно или несколько расположений сигналов в модели, в которых следует открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается по конфигурации с разомкнутым контуром, созданной путем открытия контуров обратной связи в определенных местоположениях. Например, чтобы оценить цель настройки с помощью проема в месте с именем 'x', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в модели Simulink ®, щелкните значок![]() . Чтобы удалить сигнал из списка ввода или вывода, щелкните значок.
. Чтобы удалить сигнал из списка ввода или вывода, щелкните значок. ![]() После выбора нескольких сигналов их можно переупорядочить с помощью
После выбора нескольких сигналов их можно переупорядочить с помощью![]() и.
и. ![]() Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Этот раздел диалогового окна используется для задания пределов расположения полюсов.
Минимальная скорость распада
Введите целевую минимальную скорость затухания для системных полюсов. Полюса системы с замкнутым контуром, зависящие от настраиваемых параметров, ограничены для удовлетворения Re(s) < -MinDecay для систем непрерывного времени или log(|z|) < -MinDecay*Ts для систем дискретного времени с временем выборки Ts. Это ограничение помогает обеспечить стабильную динамику в настроенной системе.
Введите 0, чтобы не ограничивать скорость затухания.
Минимальное демпфирование
Введите заданное минимальное демпфирование полюсов с замкнутым контуром настроенной системы в качестве значения от 0 до 1. Полюса системы с замкнутым контуром, зависящие от настраиваемых параметров, ограничены для удовлетворения Re(s) < -MinDamping*|s|. За дискретное время коэффициент демпфирования вычисляется с использованием s = log(z)/Ts.
Введите 0, чтобы не накладывать ограничений на коэффициент демпфирования.
Максимальная собственная частота
Введите целевую максимальную собственную частоту полюсов настроенной системы в единицах настраиваемой модели системы управления. При настройке системы управления с использованием этого требования полюса системы с замкнутым контуром, зависящие от настраиваемых параметров, ограничиваются для удовлетворения |s| < MaxFrequency для систем непрерывного времени или |log(z)| < MaxFrequency*Ts для систем дискретного времени с временем выборки Ts. Это ограничение предотвращает быструю динамику в системе управления.
Войти Inf не накладывать никаких ограничений на собственную частоту.
Этот раздел диалогового окна используется для задания дополнительных характеристик цели полюсов.
Обеспечение цели в частотном диапазоне
Ограничьте применение цели настройки определенной полосой частот. Укажите полосу частот как вектор строки формы [min,max], выраженное в единицах частоты модели. Например, чтобы создать цель настройки, применяемую только в диапазоне от 1 до 100 рад/с, введите [1,100]. По умолчанию цель настройки применяется на всех частотах для непрерывного времени и до частоты Найквиста для дискретного времени.
Цель полюсов применяется только к полюсам с собственной частотой в указанном диапазоне.
Применить цель к
Эта опция используется при настройке сразу нескольких моделей, например массива моделей, полученных линеаризацией модели Simulink в различных рабочих точках или значениями параметров блока. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Только модели (Only Models). Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что необходимо применить цель настройки ко второй, третьей и четвертой моделям в массиве модели. Для ограничения применения требования введите 2:4 в текстовом поле «Только модели».
Дополнительные сведения о настройке для нескольких моделей см. в разделе Подходы к надежной настройке (инструментарий надежного управления).
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если цель настройки является жестким ограничением.
Для цели поляков f (x) отражает относительное удовлетворение или нарушение цели. Например, если Ваша Цель поляков ограничивает полюса с обратной связью обратной связи к минимальному демпфированию ζ = 0.5, то:
f (x) = 1 означает, что наименьшее демпфирование среди полюсов с ограничением имеет значение, приблизительно 0,5.
f (x) = 1.1 означает самое маленькое демпфирование ζ = 0.5/1.1 = 0.45, примерно на 10% меньше, чем цель.
f (x) = 0.9 означает самое маленькое демпфирование ζ = 0.5/0.9 = 0.55, примерно на 10% лучше, чем цель.
