Цилиндрическая или планетарная активная дифференциальная передача
Блок динамики транспортного средства/силовой агрегат/привод/блок конечного привода
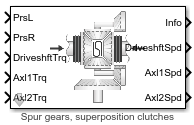
Блок активного дифференциала реализует активный дифференциал для учета передачи мощности от передачи к осям. Блок моделирует активный дифференциал как разомкнутый дифференциал, связанный либо со шпорой, либо с планетарной дифференциальной передачей. Блок использует сигналы внешнего давления для регулирования давления сцепления для ускорения или замедления вращения каждой оси.
Используйте блок в рабочем процессе HIL (hardware-in-the-loop) и оптимизации для динамического соединения карданного вала с осями колес, когда требуется направить крутящий момент трансмиссии на определенную ось. Для детальных исследований вождения передних колес используйте блок для соединения карданного вала с универсальными соединениями. Блок подходит для использования в исследованиях системы с замкнутым контуром управления, например, стабильности рыскания и векторизации крутящего момента. Все параметры настраиваются.
Чтобы задать активный дифференциал, откройте параметры «Активный дифференциал» и укажите тип активного дифференциала.
Настройка | Блокирование реализации |
|---|---|
Spur gears, superposition clutches | Сцепления находятся в суперпозиции через систему передач с тремя бандами и корпус дифференциала |
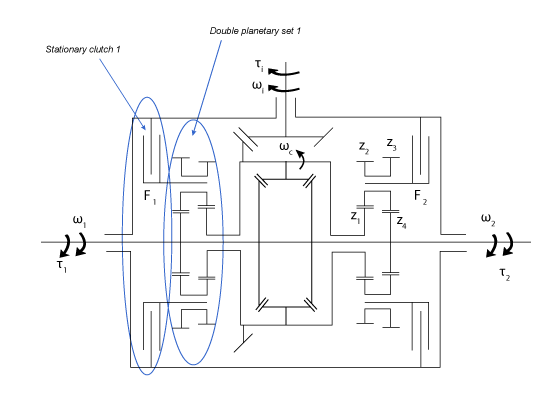
Double planetary gears, stationary clutches | Муфты крепятся к водилу и осям через двойные планетарные зубчатые передачи |
С помощью параметра «Разомкнутый дифференциал» укажите расположение разомкнутого дифференциала слева или справа от центральной линии.
В зависимости от имеющихся данных для определения способа соединения различных моментов, применяемых к осям, используется параметр «Муфта скольжения».
Настройка | Блокирование реализации |
|---|---|
Pre-loaded ideal clutch | Крутящий момент, смоделированный как сухая муфта с постоянными коэффициентами трения |
Slip speed dependent torque data | Крутящий момент определяется из справочной таблицы, которая является функцией скорости скольжения и давления сцепления |
Активный дифференциальный блок не включает контроллер или внешнюю динамику привода сцепления. Эта информация используется для управления давлением на входной муфте. Информационная шина содержит скорости скольжения на муфте 1, Δωcl1 и муфте 2, Δωcl2.
Крутящий момент на входной оси | Δωcl1 | Δωcl2 | Входное давление сцепления |
|---|---|---|---|
Положительный крутящий момент оси 1 |
| Н/Д | Увеличить давление в муфте 1 |
Положительный крутящий момент оси 1 |
| Н/Д | Расцепить муфту 1 и 2 |
Положительный крутящий момент оси 2 | Н/Д |
| Увеличить давление в муфте 1 |
Положительный крутящий момент оси 2 | Н/Д |
| Расцепить муфту 1 и 2 |
Блок Active Differential реализует эти уравнения для представления механического динамического отклика для конфигураций суперпозиции и неподвижного сцепления. Для определения передаточных чисел блок использует скорость сцепления и количество зубьев для каждой зубчатой пары. Допустимая разность скоростей колес (AWSD) ограничивает разность скоростей колес для положительного крутящего момента.
Механическая динамическая реакция | Уравнения | |
|---|---|---|
Наложение сцеплений и прямозубой передачи | Стационарные муфты и планетарная передача | |
Коронная передача |
|
ü dbd − Ti
|
Ось 1 |
|
start1b1 − Ti1
|
Ось 2 |
|
start2b2 − Ti2
|
Передаточные числа |
|
|
Зависимости жесткой связи |
|
|
Допустимая разность скоростей колес (AWSD) |
) ⋅100%
|
) ⋅100%
|
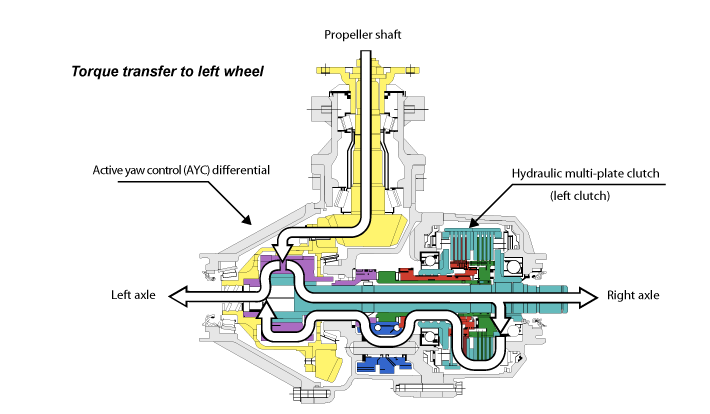
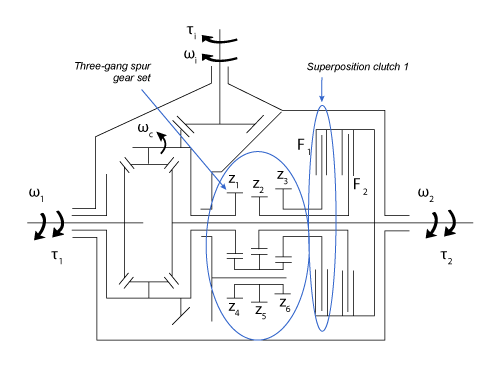
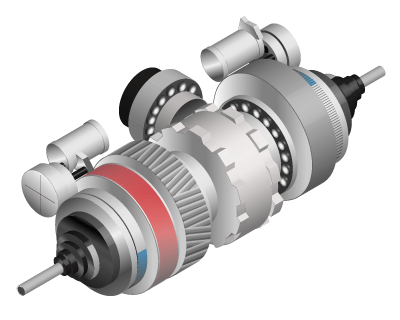
Эти суперпозиционные иллюстрации сцепления показывают конфигурацию сцепления и схему передачи крутящего момента левому колесу.
На иллюстрациях показана конфигурация и схема неподвижного сцепления.
Как для идеальной конфигурации сцепления, так и для конфигурации со скоростью скольжения муфта скольжения является функцией скорости скольжения и давления сцепления. Скорость скольжения зависит от скорости скольжения на каждом из интерфейсов сцепления.
Идеальная модель муфты сцепления использует скорость скольжения оси, давление сцепления и трение для расчета крутящего момента сцепления. Коэффициент трения является функцией скорости скольжения.
Реффтан (4 λ p)
Для расчета общей силы сцепления блок использует эффективный радиус, давление сцепления и силу предварительной нагрузки сцепления.
FT≥0
Радиусы диска определяют эффективный радиус сцепления, по которому действует сила сцепления.
Ro2-Ri2)
Чтобы рассчитать крутящий момент сцепления, модель сцепления со скоростью скольжения использует данные о крутящем моменте, которые являются функцией скорости скольжения и давления сцепления. Угловые скорости осей определяют скорость скольжения.
P1,2)
Уравнения используют эти переменные.
| Aeff | Эффективная область давления сцепления |
| BD | Линейное вязкое демпфирование коронной передачи |
| b1, b2 | Линейное вязкое демпфирование осей 1 и 2 соответственно |
| Fc, FT | Сила предварительной нагрузки сцепления и общая сила сцепления соответственно |
| Jd | Инерция вращения носителя |
| Jgc | Инерция вращения трехгранной передачи |
| Jc1, Jc2 | Вращательная инерция планетарного носителя 1 и 2 соответственно |
| Jr1, Jr2 | Планетарная кольцевая шестерня 1 и 2 вращательной инерции соответственно |
| Js1, Js2 | Планетарная солнечная шестерня 1 и 2 вращательной инерции соответственно |
| J1, J2 | Инерция вращения осей 1 и 2 соответственно |
| N | Передаточное число приводного вала |
| Без обозначения даты | Количество дисков |
| Ns1, Ns2 | Сцепление 1 и 2 передаточного числа водила и шпоры соответственно |
| Np1, Np2 | Планетарное передаточное число 1 и 2 соответственно |
| P1, P2 | Давление сцепления 1 и 2 соответственно |
| Reff | Эффективный радиус сцепления |
| Ри, Ро | Внутренний и внешний радиус кольцевого диска соответственно |
| Tc | Крутящий момент сцепления |
| Tcl1, Tcl2 | Крутящий момент сцепления 1 и 2 соответственно |
| Td | Крутящий момент приводного вала |
| T1, T2 | Крутящий момент осей 1 и 2 соответственно |
| Ti | Момент внутреннего сопротивления оси |
| Ti1, Ti2 | Крутящий момент внутреннего сопротивления осей 1 и 2 |
| ωd | Угловая скорость карданного вала |
| ϖ | Скорость скольжения |
| ω1, ω2 | Угловая скорость осей 1 и 2 соответственно |
Δωcl1, Δωcl2 | Скорость скольжения муфты 1 и 2 на стыке соответственно |
ωcl1, ωcl2 | Угловая скорость сцепления 1 и 2 соответственно |
| μ | Коэффициент трения сцепления |
| zi | Количество зубьев на зубчатом колесе i |
[1] Деур, Дж., Иванович, В., Хэнкок, М. и Ассадиан, Ф. «Моделирование активной дифференциальной динамики». В процедурах ASME. Транспортные системы. Том 17, стр.: 427-436.
