Ограниченный дифференциал как планетарная коническая передача
Блок силового агрегата/Привод/Блок конечного привода
Блок динамики транспортного средства/силовой агрегат/привод/блок конечного привода
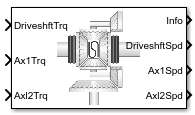
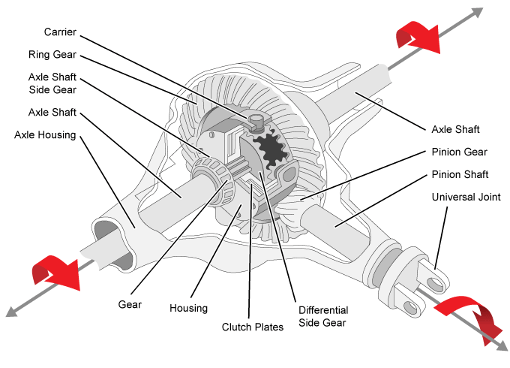
Блок Limited Slip Differential реализует дифференциал как планетарную коническую зубчатую передачу. Блок сопоставляет коническую шестерню карданного вала с коронной (кольцевой) конической шестерней. Можно указать:
Передаточное отношение несущего вала к карданному валу
Расположение корончатого колеса
Коэффициенты вязкости и демпфирования для осей и водила
Тип скользящей муфты
Используйте блок в анализе трансмиссии системного уровня для учета передачи мощности от трансмиссии к колесам. Блок подходит для использования в рабочих процессах аппаратного обеспечения в цикле (HIL) и оптимизации. Все параметры настраиваются.
В ограниченном дифференциале скольжения, чтобы предотвратить скольжение одного из колес, дифференциал разделяет крутящий момент, приложенный к левой и правой осям. При различном крутящем моменте, приложенном к осям, колеса могут перемещаться с разными угловыми скоростями, предотвращая скольжение. Блок реализует три способа соединения различных моментов, приложенных к осям:
Преднагруженное идеальное сцепление
Данные о крутящем моменте, зависящие от скорости скольжения
Входные данные, зависящие от крутящего момента
Блок использует систему координат, которая создает положительное движение шины и транспортного средства для стандартных конфигураций двигателя, трансмиссии и дифференциала. Стрелки указывают положительное движение.
Чтобы учесть эффективность блока, используйте параметр Коэффициент эффективности. В этой таблице приводится сводная информация о реализации блоков для каждого параметра.
| Настройка | Внедрение |
|---|---|
| Постоянная эффективность, которую можно задать с помощью параметра Constant efficiency factor, eta. |
| Эффективность как функция входного крутящего момента базовой передачи, температуры воздуха и скорости карданного вала. Используйте эти параметры для указания таблицы подстановки и точек останова:
Для температуры воздуха можно:
Чтобы выбрать метод интерполяции, используйте параметр Метод интерполяции. Дополнительные сведения см. в разделе Методы интерполяции. |
Для учета мощности блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Механическая мощность от карданного вала | |
| Механическая мощность от оси 1 | |||
| Механическая мощность от оси 2 | |||
|
|
| Общая потеря мощности | ||
| Потеря мощности из-за демпфирования | |||
| Потеря мощности из-за сцепления | пр | | ||
|
|
| Изменение скорости хранимой внутренней энергии | ω1ω˙1J1+ω2ω˙2J2+ωdω˙dJd) | |
Блок дифференциала ограниченного проскальзывания реализует эти дифференциальные уравнения для представления механической динамической характеристики коронного зубчатого колеса, левой оси и правой оси.
| Механическая динамическая реакция | Дифференциальное уравнение |
|---|---|
| Коронная шестерня |
|
| Левая ось |
|
| Правая ось |
|
Блок имеет жесткую связь между коронной шестерней и осями. Эти уравнения ограничений применяются.
+ start2)
Уравнения используют эти переменные.
| N | Передаточное число водила и карданного вала |
| Jd | Инерция вращения коронного зубчатого колеса в сборе |
| BD | Линейное вязкое демпфирование коронной передачи |
| ωd | Угловая скорость карданного вала |
Скорость скольжения | |
| J1 | Инерция вращения оси 1 |
| b1 | Ось 1 линейного вязкого демпфирования |
| ω1 | Скорость оси 1 |
| J2 | Инерция вращения оси 2 |
| b2 | Ось 2 линейного вязкого демпфирования |
| ω2 | Угловая скорость оси 2 |
| η | Эффективность |
| Td | Крутящий момент приводного вала |
| T1 | Крутящий момент оси 1 |
| T2 | Крутящий момент оси 2 |
| Ti | Момент внутреннего сопротивления оси |
| Ti1 | Крутящий момент внутреннего сопротивления оси 1 |
| Ti2 | Крутящий момент внутреннего сопротивления оси 2 |
| μ | Коэффициент трения |
Эффективный радиус сцепления | |
Внешний радиус кольцевого диска | |
| Ri | Внутренний радиус кольцевого диска |
| ФК | Усилие сцепления |
| Tc | Крутящий момент сцепления |
| μ | Коэффициент трения |
Табличные блоки в разнице ограниченного проскальзывания имеют следующие настройки параметров:
Метод интерполяции - Linear
Метод экстраполяции - Clip
Идеальная модель муфты сцепления использует скорость скольжения оси и трение для расчета крутящего момента муфты. Коэффициент трения является функцией скорости скольжения.
4|ϖ|)
Радиусы диска определяют эффективный радиус сцепления, по которому действует сила сцепления.
Ro2-Ri2)
Угловые скорости осей определяют скорость скольжения.
Чтобы рассчитать крутящий момент сцепления, модель муфты со скоростью скольжения использует данные крутящего момента, которые являются функцией скорости скольжения. Угловые скорости осей определяют скорость скольжения.
Для вычисления крутящего момента сцепления модель муфты с входным крутящим моментом использует данные крутящего момента, которые являются функцией входного крутящего момента.
Разомкнутый дифференциальный блок предполагает жесткую связь между коронным зубчатым колесом и осями. Эти уравнения ограничений применяются.
+ start2)
[1] Деур, Дж., Иванович, В., Хэнкок, М. и Ассадиан, Ф. «Моделирование активной дифференциальной динамики». В процедурах ASME. Транспортные системы. Том 17, стр.: 427-436.
