Двойная независимая подвеска
Блок/подвеска Vehicle Dynamics
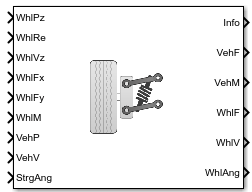
Блок Independent Suspension - Double Wishbone реализует независимую подвеску с двойным подвесом для нескольких осей с несколькими путями на одну ось.
Блок моделирует подвешивание, демпфирование и геометрические эффекты как функции относительных положений и скоростей транспортного средства и колесного водила с характерными для оси податливостью и параметрами демпфирования. Используя соответствие подвески и демпфирование, блок вычисляет усилие подвески на транспортном средстве и колесе. Блок использует систему координат Z-down (заданную в SAE J670).
| Для каждого | Можно указать |
|---|---|
|
Ось |
|
|
След |
|
Блок содержит накопительные пружинные элементы и рассеивающие энергию демпферные элементы. Он не содержит энергоаккумулирующих массовых элементов. Блок предполагает, что блоки транспортного средства (подпружиненные) и колеса (неподрессоренные), соединенные с блоком, сохраняют энергию подвески, связанную с массой.
В этой таблице представлены параметры блока для транспортного средства со следующими параметрами:
Две оси
Два пути на ось
Ввод угла поворота для обеих гусениц на передней оси
Противоперекачивающая планка на передней оси
| Параметр | Настройка |
|---|---|
| Количество осей, NumAxl |
|
Количество дорожек по осям, NumHAXl |
|
| Управляемая ось, обеспечиваемая осью, StrgEnStartAxl |
|
| Антикабельная ось, обеспечиваемая осью, AntiSwayEnStartAxl |
|
Блок использует линейную пружину и демпфер для моделирования вертикальных динамических эффектов подвесной системы. Используя относительные положения и скорости транспортного средства и колесного носителя, блок вычисляет вертикальные силы подвески на колесе и транспортном средстве. Блок использует линейное уравнение, которое связывает вертикальное демпфирование и соответствие высоте подвески, скорости изменения высоты подвески и абсолютное значение углов поворота рулевого управления.
Блок реализует это уравнение.
Fzhstopa, t + Fzaswya, t
Коэффициент демпфирования c зависит от значения параметра Включить активное демпфирование.
Включить активную настройку демпфирования | Демпфирование |
|---|---|
off | Константа, c = cza |
on | Таблица поиска, которая является функцией рабочего цикла активного демпфера и скорости привода z˙va,t−z˙wa,t)) |
Блок предполагает, что подвесные элементы не имеют массы. Поэтому силы подвески и моменты, приложенные к транспортному средству, равны силам подвески и моментам, приложенным к колесу.
Fwxa, t
Блок устанавливает положения и скорости колес равными боковым и продольным положениям и скоростям транспортного средства.
Уравнения используют эти переменные.
| Fwza, t, Mwza, t | Усилие подвески и момент, приложенный к колесу на оси |
| Fwxa, t, Mwxa, t | Усилие подвески и момент, приложенный к колесу на оси |
| Fwya, t, Mwya, t | Усилие подвески и момент, приложенный к колесу на оси |
| Fvza, t, Mvza, t | Усилие и момент подвески, приложенные к транспортному средству на оси |
| Fvxa, t, Mvxa, t | Усилие и момент подвески, приложенные к транспортному средству на оси |
| Фвья, т, Мвя, т | Усилие и момент подвески, приложенные к транспортному средству на оси |
| Fz0a | Усилие предварительной нагрузки пружины вертикальной подвески, приложенное к колесам на оси |
| kza | Постоянная вертикальной пружины, применяемая к путям на оси |
| mhsteera | Угол поворота рулевого управления к вертикальному уклону силы, применяемому на колесном водиле для гусениц на оси |
| δстира, т | Ввод угла поворота для оси |
| cza | Постоянная вертикального демпфирования, применяемая к путям на оси |
| Рева, т | Эффективный радиус колеса для оси |
| Фжстопа, т | Сила вертикального упора на оси |
| Фзасвья, т | Вертикальное противодействующее усилие на оси |
| zva, t, жва, t | Перемещение и скорость транспортного средства на оси |
| zwa, t, жва, t | Перемещение и скорость пути на оси |
| хва, т, ẋva,t | Перемещение и скорость транспортного средства на оси |
| xwa, t, ẋwa,t | Перемещение и скорость пути на оси |
| yva, t, ẏva,t | Перемещение и скорость транспортного средства на оси |
| ywa, t, ẏwa,t | Перемещение и скорость пути на оси |
| Ха, т | Высота подвески на оси |
| Рева, т | Эффективный радиус колеса на оси a, трасса t |
Сила обратной связи Fzhstopa, t, которая применяется блоком, зависит от того, сжимается или выдвигается подвеска. Блок применяет силу:
При сжатии, когда подвеска сжата больше максимального расстояния, заданного параметром Максимальная высота подвески, Hmax.
При удлинении, если удлинение подвески больше максимального удлинения, заданного параметром Suspension maximum height, Hmax.
Для вычисления силы блок использует жесткость на основе гиперболической касательной и экспоненциального масштабирования.
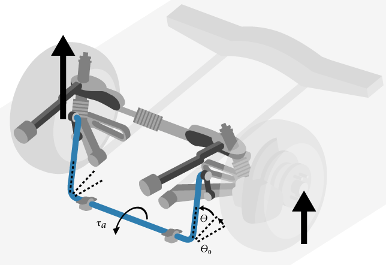
При необходимости блок реализует противодействующее усилие, Fzaswya, t, для осей, которые имеют две дорожки. На этом рисунке показано, как противовыбросовая планка передает крутящий момент между двумя независимыми гусеницами подвески на общей оси. Каждая независимая подвеска прикладывает крутящий момент к противовыбросовому стержню через радиальный рычаг, который проходит от противовыбросового стержня назад к независимой точке соединения подвески.
Для вычисления силы стержня сдвига блок реализует эти уравнения.
| Вычисление | Уравнение |
|---|---|
|
Угловое отклонение противовыбросового стержня для данной оси и колеи, Δϴa,t |
zwa, t + zva, tr) |
|
Угол перекручивания противовыбросового бруса, ϴa |
rtanstart0a − zwa, 2 + zva, 2r) |
|
Крутящий момент противоперекачивающей планки, |
kastarta |
|
Противодавляющие усилия, приложенные к колесу на оси |
2+zva, 2r)) |
Уравнения и рисунок используют эти переменные.
| τa |
Крутящий момент противовсплеска |
| θ |
Угол перекручивания противовыбросового бруса |
| θ0a |
Начальный угол перекручивания противовыбросового стержня |
| Δϴa,t | Угловое отклонение противовыбросового стержня на оси a, трасса t |
| r | Радиус руки противовеса |
| z0 | Расстояние по вертикали от точки соединения противовыбросового стержня до осевой линии противовыбросового стержня |
| Фзсвая, т |
Противодавляющее усилие, приложенное к колесу на оси |
| zva, t |
Перемещение транспортного средства на оси |
| zwa, t |
Перемещение колеса на оси |
Чтобы рассчитать углы развала, литья и носка, блок использует линейные функции высоты подвески и угла поворота.
Уравнения используют эти переменные.
| α a, t |
Угол развала колеса на оси |
| λ а, t |
Угол качения колеса на оси |
| starta, t |
Угол носка колеса на оси |
| ξ0a, η0a, ζ0a |
Номинальная ось подвески а углы развала, литья и носка соответственно при нулевом угле поворота рулевого управления |
| mhcambera, mhcastera, mhtoea |
Углы развала, литья и носка соответственно по отношению к уклону высоты подвески для оси |
| mcambersteera, mcastersteera, mtoesteera |
Углы развала, литья и носка соответственно в зависимости от угла поворота рулевого управления для оси |
| mhsteera |
Угол поворота рулевого управления по отношению к уклону вертикальной силы для оси |
| δстира, т |
Ввод угла поворота для оси |
| zva, t |
Перемещение транспортного средства на оси |
| zwa, t |
Перемещение пути на оси |
Дополнительно можно ввести углы поворота гусениц. Для вычисления углов поворота колес блок смещает входные углы поворота с линейной функцией высоты подвески.
mtoesteera' δsteera, t |
Уравнение использует эти переменные.
| mtoesteera |
Ось |
| mhsteera |
Ось |
| mhtoea |
Ось |
| δwhlsteera, t |
Угол поворота колеса для оси |
| δстира, т |
Ввод угла поворота для оси |
| zva, t |
Перемещение транспортного средства на оси |
| zwa, t |
Перемещение пути на оси |
Блок вычисляет эти характеристики подвески для каждой оси, a, дорожка, t.
| Вычисление | Уравнение |
|---|---|
Рассеиваемая мощность, Psuspa, t |
z˙va,t−z˙wa,t,z˙va,t−z˙wa,t,δsteera,t) |
Поглощенная энергия, Esuspa, t |
z˙va,t−z˙wa,t,z˙va,t−z˙wa,t,δsteera,t) |
Высота подвески, Га, т |
mhsteera 'δsteera, t |) |
Расстояние от центра колеса до интерфейса шины/дороги |
+ Ha, t |
Уравнения используют эти переменные.
| mhsteera | Угол поворота рулевого управления к вертикальному уклону силы, применяемому на колесном водиле для гусениц на оси |
| δстира, т | Ввод угла поворота для оси |
| Рева, т | Ось |
| Fz0a | Усилие предварительной нагрузки пружины вертикальной подвески, приложенное к колесам на оси |
| zwtra, t | Расстояние от центра колеса до интерфейса шины/дороги вдоль оси Z, закрепленной на транспортном средстве |
| zva, t, жва, t | Перемещение и скорость транспортного средства на оси |
| zwa, t, жва, t | Перемещение и скорость пути на оси |
[1] Гиллеспи, Томас. Основы динамики транспортных средств. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики транспортных средств. Терминология динамики транспортных средств. SAE J670. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика транспортных средств и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
