Картированная подвеска сплошной оси
Блок/подвеска Vehicle Dynamics
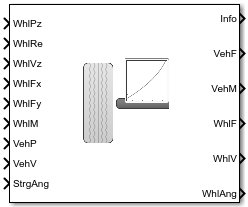
Блок Solid Axle Suspension - Mapped (Подвеска сплошной оси - Картированная) реализует картированную подвеску сплошной оси для нескольких осей с несколькими дорожками на ось.
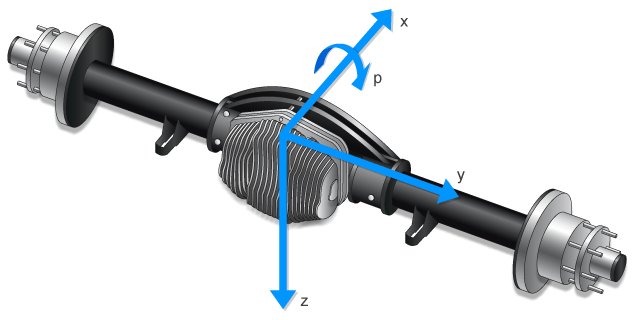
Блок моделирует подвешивание, демпфирование и геометрические эффекты как функции положений и скоростей пути, с параметрами податливости и демпфирования, зависящими от оси. Используя положение пути и скорость, блок вычисляет вертикальное положение пути и силы подвески на транспортном средстве и колесе. В блоке используется система координат Z-down (определенная в SAE J670) и твердотельная ось. Система координат сплошной оси, показанная здесь, выровнена с системой координат транспортного средства по оси Z, а ось X - в направлении движения транспортного средства вперед.
| Для каждого | Можно указать |
|---|---|
|
Ось |
|
|
След |
|
Блок содержит накопительные пружинные элементы и рассеивающие энергию демпферные элементы. Блок также накапливает энергию через угловое ускорение крена оси и центр оси вертикального и бокового ускорения массы.
В этой таблице представлены параметры блока для транспортного средства со следующими параметрами:
Две оси.
Две дорожки на ось.
Ввод угла поворота для обеих гусениц на передней оси.
| Параметр | Настройка |
|---|---|
| Количество осей, NumAxl |
|
Количество дорожек по осям, NumHAXl |
|
| Управляемая ось, обеспечиваемая осью, StrgEnStartAxl |
|
Блок использует таблицу поиска, которая связывает вертикальное демпфирование и соответствие высоте подвески, скорости изменения высоты подвески и углу поворота. Таблицу выбора силы колеса можно откалибровать таким образом, чтобы угол поворота по отношению к номинальному центральному положению создавал силу, увеличивающую высоту транспортного средства. В частности, блок:
Использование | Вычислять |
|---|---|
|
|
Для вычисления динамики оси блок реализует эти уравнения. Блок игнорирует эффекты:
Поперечная и продольная поступательная скорость.
Угловая скорость вокруг вертикальной и поперечной осей.
Ixx000Iyy000Izz] − 1 = [MxIxx00]
Для сил и моментов блок использует таблицы поиска.
zva,t−zwa,t,z˙va,t−z˙wa,t,δsteera,t)
Силы подвески и моменты, приложенные к транспортному средству, равны силам подвески и моментам, приложенным к колесу.
Fwxa, t
Уравнения используют эти переменные.
| Fwza, t, Mwza, t | Усилие подвески и момент, приложенный к колесу на оси |
| Fwxa, t, Mwxa, t | Усилие подвески и момент, приложенный к колесу на оси |
| Fwya, t, Mwya, t | Усилие подвески и момент, приложенный к колесу на оси |
| Fvza, t, Mvza, t | Усилие и момент подвески, приложенные к транспортному средству на оси |
| Fvxa, t, Mvxa, t | Усилие и момент подвески, приложенные к транспортному средству на оси |
| Фвья, т, Мвя, т | Усилие и момент подвески, приложенные к транспортному средству на оси |
| Fz0a | Усилие предварительной нагрузки пружины вертикальной подвески, приложенное к колесам на оси |
| kza | Постоянная вертикальной пружины, применяемая к путям на оси |
| mhsteera | Угол поворота рулевого управления к вертикальному уклону силы, применяемому на колесном водиле для гусениц на оси |
| δстира, т | Ввод угла поворота для оси |
| cza | Постоянная вертикального демпфирования, применяемая к путям на оси |
| Рева, т | Эффективный радиус колеса для оси |
| Фжстопа, т | Сила вертикального упора на оси |
| Фзасвья, т | Вертикальное противодействующее усилие на оси |
| zva, t, жва, t | Перемещение и скорость транспортного средства на оси |
| zwa, t, жва, t | Перемещение и скорость пути на оси |
| хва, т, ẋva,t | Перемещение и скорость транспортного средства на оси |
| xwa, t, ẋwa,t | Перемещение и скорость пути на оси |
| yva, t, ẏva,t | Перемещение и скорость транспортного средства на оси |
| ywa, t, ẏwa,t | Перемещение и скорость пути на оси |
| Ха, т | Высота подвески на оси |
| Рева, т | Эффективный радиус колеса на оси a, трасса t |
Чтобы рассчитать углы развала, литья и носка, блок использует таблицу поиска Galookup, которая является функцией высоты подвески и угла поворота.
δsteera, t)
Уравнения используют эти переменные.
| α a, t | Угол развала колеса на оси |
| λ а, t | Угол качения колеса на оси |
| starta, t | Угол носка колеса на оси |
| δстира, т | Ввод угла поворота для оси |
| zva, t | Перемещение транспортного средства на оси |
| zwa, t | Перемещение колеса на оси |
Дополнительно можно ввести углы поворота гусениц. Для вычисления углов поворота колес блок смещает входные углы поворота в зависимости от высоты подвески. Для расчета блок использует таблицу поиска Galookup, которая является функцией положения подвески и угла поворота.
, δsteera, t)
Уравнение использует эти переменные.
| δwhlsteera, t |
Угол поворота колеса для оси |
| δстира, т |
Ввод угла поворота для оси |
| zva, t |
Перемещение транспортного средства на оси |
| zwa, t |
Перемещение колеса на оси |
Блок вычисляет эти характеристики подвески для каждой оси, a, дорожка, t.
| Вычисление | Уравнение |
|---|---|
Рассеиваемая мощность, Psuspa, t |
z˙va,t−z˙wa,t,z˙va,t−z˙wa,t,δsteera,t) |
Поглощенная энергия, Esuspa, t |
z˙va,t−z˙wa,t,z˙va,t−z˙wa,t,δsteera,t) |
Высота подвески, Га, т |
f_susp_dz_bp)) |
Расстояние от центра колеса до интерфейса шины/дороги |
+ Ha, t |
Уравнения используют эти переменные.
| mhsteera | Угол поворота рулевого управления к вертикальному уклону силы, применяемому на колесном водиле для гусениц на оси |
| δстира, т | Ввод угла поворота для оси |
| Рева, т | Ось |
| f_susp_dz_bp | Точки останова по высоте подвески вертикальной оси |
| zwtra, t | Расстояние от центра колеса до интерфейса шины/дороги вдоль оси Z, закрепленной на транспортном средстве |
| zva, t, жва, t | Перемещение и скорость транспортного средства на оси |
| zwa, t, жва, t | Перемещение и скорость пути на оси |
[1] Гиллеспи, Томас. Основы динамики транспортных средств. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики транспортных средств. Терминология динамики транспортных средств. SAE J670. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика транспортных средств и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
Подвеска на твердой оси | Подвеска сплошной оси - цилиндрическая пружина | Подвеска сплошной оси - листовая пружина
