Найти шаблон в изображении
Поиск шаблона на изображении.
Создать vision.TemplateMatcher и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
tMatcher = vision.TemplateMatchertMatcher. Этот объект выполняет сопоставление шаблонов путем смещения шаблона с шагом в один пиксел по всей внутренней части изображения.
tMatcher = vision.TemplateMatcher(Name,Value)tMatcher = vision.TemplateMatcher('Metric','Sum of absolute differences')
location = tMatcher(I,T)Iи матрица шаблона, T. Объект вычисляет местоположение путем сдвига шаблона с шагом в один пиксел по всей внутренней части изображения.
[возвращает расположение наилучшего соответствия шаблона location,numberOfValues,numValid] = tMatcher(I,T,ROI)location, метрические значения вокруг наилучшего соответствия numberOfValuesи логический флаг numValid. Это применимо при установке OutputValue свойство для 'Best match location' и BestMatchNeighborhoodOutputPort свойство для true.
[ также возвращает логический флаг, location,numberOfValues,numValid,ROIvalid] = tMatcher(I,T,ROI)ROIvalid чтобы указать, ROI находится вне границ входного изображения I. Это применимо при установке OutputValue свойство для 'Best match location', и BestMatchNeighborhoodOutputPort, ROIInputPort, и ROIValidityOutputPort свойства для true.
Чтобы использовать функцию объекта, укажите object™ System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
В этом примере показано, как удалить эффект движения камеры из видеопотока.
Введение
В этом примере сначала определяется цель для отслеживания. При этом это задняя часть автомобиля и номерной знак. Мы также создаем динамическую область поиска, положение которой определяется последним известным целевым местоположением. Затем мы ищем цель только в пределах этой области поиска, что уменьшает количество вычислений, необходимых для поиска цели. В каждом последующем видеокадре мы определяем, насколько цель сдвинулась относительно предыдущего кадра. Мы используем эту информацию, чтобы удалить нежелательные поступательные движения камеры и создать стабилизированное видео.
Инициализация
Создайте системный object™ для чтения видео из мультимедийного файла. Мы установили выход только с интенсивностью видео.
% Input video file which needs to be stabilized. filename = 'shaky_car.avi'; hVideoSource = VideoReader(filename);
Создайте объект matcher System шаблона для вычисления местоположения наилучшего соответствия цели в видеокадре. Мы используем это расположение, чтобы найти трансляцию между последовательными видеокадрами.
hTM = vision.TemplateMatcher('ROIInputPort', true, ... 'BestMatchNeighborhoodOutputPort', true);
Создайте объект System для отображения исходного видео и стабилизированного видео.
hVideoOut = vision.VideoPlayer('Name', 'Video Stabilization'); hVideoOut.Position(1) = round(0.4*hVideoOut.Position(1)); hVideoOut.Position(2) = round(1.5*(hVideoOut.Position(2))); hVideoOut.Position(3:4) = [650 350];
Здесь мы инициализируем некоторые переменные, используемые в цикле обработки.
pos.template_orig = [109 100]; % [x y] upper left corner pos.template_size = [22 18]; % [width height] pos.search_border = [15 10]; % max horizontal and vertical displacement pos.template_center = floor((pos.template_size-1)/2); pos.template_center_pos = (pos.template_orig + pos.template_center - 1); W = hVideoSource.Width; % Width in pixels H = hVideoSource.Height; % Height in pixels BorderCols = [1:pos.search_border(1)+4 W-pos.search_border(1)+4:W]; BorderRows = [1:pos.search_border(2)+4 H-pos.search_border(2)+4:H]; sz = [W, H]; TargetRowIndices = ... pos.template_orig(2)-1:pos.template_orig(2)+pos.template_size(2)-2; TargetColIndices = ... pos.template_orig(1)-1:pos.template_orig(1)+pos.template_size(1)-2; SearchRegion = pos.template_orig - pos.search_border - 1; Offset = [0 0]; Target = zeros(18,22); firstTime = true;
Цикл обработки потока
Это основной цикл обработки, который использует объекты, которые мы создали выше для стабилизации входного видео.
while hasFrame(hVideoSource) input = rgb2gray(im2double(readFrame(hVideoSource))); % Find location of Target in the input video frame if firstTime Idx = int32(pos.template_center_pos); MotionVector = [0 0]; firstTime = false; else IdxPrev = Idx; ROI = [SearchRegion, pos.template_size+2*pos.search_border]; Idx = hTM(input,Target,ROI); MotionVector = double(Idx-IdxPrev); end [Offset, SearchRegion] = updatesearch(sz, MotionVector, ... SearchRegion, Offset, pos); % Translate video frame to offset the camera motion Stabilized = imtranslate(input, Offset, 'linear'); Target = Stabilized(TargetRowIndices, TargetColIndices); % Add black border for display Stabilized(:, BorderCols) = 0; Stabilized(BorderRows, :) = 0; TargetRect = [pos.template_orig-Offset, pos.template_size]; SearchRegionRect = [SearchRegion, pos.template_size + 2*pos.search_border]; % Draw rectangles on input to show target and search region input = insertShape(input, 'Rectangle', [TargetRect; SearchRegionRect],... 'Color', 'white'); % Display the offset (displacement) values on the input image txt = sprintf('(%+05.1f,%+05.1f)', Offset); input = insertText(input(:,:,1),[191 215],txt,'FontSize',16, ... 'TextColor', 'white', 'BoxOpacity', 0); % Display video hVideoOut([input(:,:,1) Stabilized]); end

Заключение
С помощью функции Computer Vision Toolbox™ из командной строки MATLAB ® легко реализовать сложные системы, такие как видеостабилизация.
Приложение
В этом примере используется следующая вспомогательная функция.
Типичное использование устройства сопоставления шаблонов включает в себя поиск небольшой области в пределах большего изображения. Область задается шаблонным изображением, которое может быть таким же большим, как входное изображение, но которое обычно меньше, чем входное изображение.
Объект выводит координаты наилучшего соответствия относительно верхнего левого угла изображения. Координаты [x
y] местоположения соответствуют центру шаблона. При использовании шаблона с нечетным числом пикселей объект использует центр шаблона. При использовании шаблона с четным числом пикселов объект использует для расположения центрированный верхний левый пиксель. В следующей таблице показано, как объект выводит местоположение (LOC), нечетных и четных шаблонов:
| Нечетное число пикселей в шаблоне | Четное число пикселей в шаблоне |
|---|---|
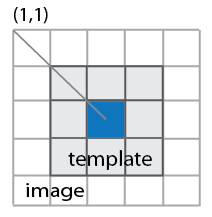 | 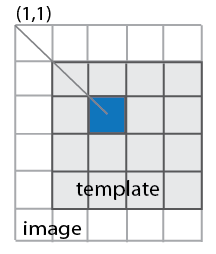 |
insertMarker | opticalFlowFarneback | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG
