Контроллер управления энергопотреблением для P0-P4 гибридных электрических транспортных средств
Блок силового агрегата/Двигатель/Диспетчерские контроллеры
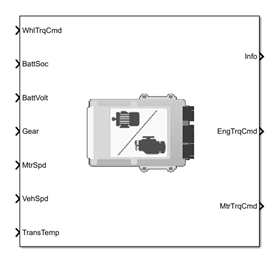
Используйте блок Equivalent Consumption Minimization Strategy (ECMS), чтобы контролировать управление энергопотреблением гибридных электрических транспортных средств (HEV). Блок оптимизирует крутящий момент, разделенный между двигателем и двигателем, чтобы минимизировать потребление энергии при сохранении состояния заряда батареи (SOC).
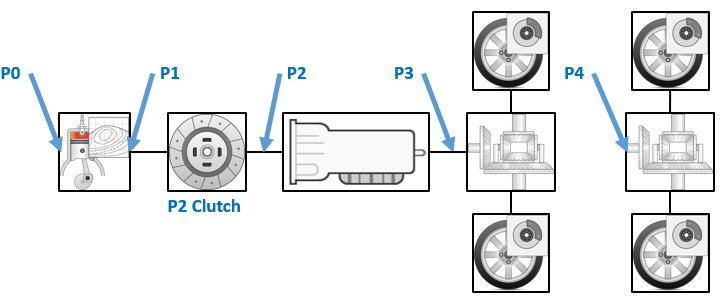
HEV- P0, P1, P2, P3 и P4 примеры готовых узлов используют блок Equivalent Consumption Minimization Strategy для гибридного управления.
Используйте параметр Motor location, чтобы задать местоположение двигателя HEV.
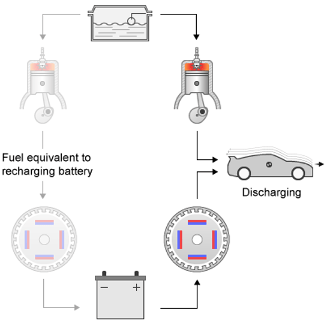
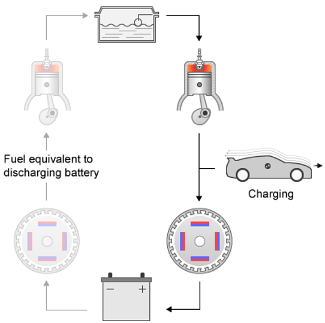
Используйте параметр ECMS method для реализации адаптивного или неадаптивного метода ECMS. Архитектуры HEV являются поддерживающей заряд, что означает, что SOC аккумулятора должен оставаться в заданной области, потому что нет возможности плагина перезарядить батарею. Батарея является энергетическим буфером, и вся энергия поступает от топлива, если изменение SOC минимизировано в течение цикла привода. Чтобы выдержать заряд в течение заданного цикла дисковода, блок реализует любой из этих методов ECMS.
| Метод ECMS | Описание |
|---|---|
| Блок использует постоянный коэффициент эквивалентности ECMS.
|
| Блок корректирует коэффициент эквивалентности ECMS с помощью выхода ПИ-контроллера.
|
Блок осуществляет динамический контролирующий контроллер, который определяет крутящий момент двигателя, крутящий момент двигателя, стартер, сцепление и команды тормозного давления. В частности, блок:
Преобразует сигнал педали акселератора драйвера в запрос крутящего момента колеса. Чтобы вычислить общий крутящий момент силового агрегата на колесах, алгоритм использует максимальные кривые крутящего момента и крутящего момента двигателя, а также передаточные и дифференциальные передаточные отношения.
Преобразует сигнал педали тормоза драйвера в запрос на давление тормоза. Алгоритм умножает сигнал педали тормоза на максимальное давление тормоза.
Реализует алгоритм регенеративного торможения для тягового двигателя, чтобы восстановить максимальное количество кинетической энергии от транспортного средства.
Блок реализует алгоритм ECMS[2] что оптимизирует крутящий момент, разделенный между двигателем и двигателем, чтобы минимизировать потребление энергии при сохранении SOC батареи. В частности, ECMS:
Присваивает стоимость электрической энергии, так что использование сохраненной электрической энергии равно потреблению топливной энергии.
| Режим аккумулятора | Эквивалентная электроэнергия | Описание |
|---|---|---|
Освобождение | Положительный | Батарея разряжает сохраненную электроэнергию, когда электрическая машина используется.
|
Зарядка | Отрицательный | Батарея сохраняет электроэнергию от:
|
Является мгновенным методом минимизации, который программное обеспечение решает на каждом временном шаге контроллера. Чтобы реализовать стратегию, ECMS выбирает оптимальный крутящий момент двигателя и двигателя в стратегии оптимизации, чтобы минимизировать эквивалентное потребление энергии.
Реализует адаптивный или неадаптивный метод ECMS.
Motor location - Расположение мотораP0 (по умолчанию) | P1 | P2 | P3 | P4Укажите местоположение двигателя HEV.
ECMS method - метод ECMSNon-adaptive (по умолчанию) | AdaptiveИспользуйте параметр ECMS method для реализации адаптивного или неадаптивного метода ECMS. Архитектуры HEV являются поддерживающей заряд, что означает, что SOC аккумулятора должен оставаться в заданной области, потому что нет возможности плагина перезарядить батарею. Батарея является энергетическим буфером, и вся энергия поступает от топлива, если изменение SOC минимизировано в течение цикла привода. Чтобы выдержать заряд в течение заданного цикла дисковода, блок реализует любой из этих методов ECMS.
| Метод ECMS | Описание |
|---|---|
| Блок использует постоянный коэффициент эквивалентности ECMS.
|
| Блок корректирует коэффициент эквивалентности ECMS с помощью выхода ПИ-контроллера.
|
Differential gear ratio, N_diff - Дифференциальное передаточное число3.32 (по умолчанию) | scalarДифференциальное передаточное число. Никаких размерностей.
Типы данных: double
Differential efficiency factor, eta_diff - Дифференциальный КПД0.98 (по умолчанию) | scalarДифференциальный коэффициент эффективности. Никаких размерностей.
Типы данных: double
Loaded wheel radius, Re - Радиус нагруженного колеса0.327 (по умолчанию) | scalarРадиус заряженного колеса, в м.
Типы данных: double
Transmission efficiency factors - Коэффициенты эффективности трансмиссииGear, input torque, input speed, and temperature (по умолчанию) | Gear onlyКоэффициенты эффективности передачи.
Типы данных: double
Transmission gear number vector, G_trans - Вектор числа трансмиссии[0 1 2 3 4 5 6] (по умолчанию) | vectorВектор номера трансмиссии. Никаких размерностей.
Типы данных: double
Transmission gear ratio vector, N_trans - Вектор передаточного числа трансмиссии[1 4.212 2.637 1.8 1.386 1 0.772] (по умолчанию) | vectorВектор передаточного числа трансмиссии. Никаких размерностей.
Типы данных: double
Transmission efficiency vector, eta_trans - Вектор эффективности передачи[1 1 1 1 1 1 1] (по умолчанию) | vectorВектор эффективности передачи. Никаких размерностей.
Чтобы включить этот параметр, установите Transmission efficiency factors равным Gear only.
Типы данных: double
Transmission efficiency torque breakpoints, Trq_trans_bpts - Точки останова момента КПД трансмиссии[25 50 75 100 150 200 250] (по умолчанию) | vectorТочки останова КПД трансмиссии, в Н· м.
Чтобы включить этот параметр, установите Transmission efficiency factors равным Gear, input torque, input speed, and temperature.
Типы данных: double
Transmission efficiency speed breakpoints, omega_trans_bpts - Точки останова скорости эффективности трансмиссии[500.383141080919 749.619781962827 1002.676141478941 1250.957852702297 1499.239563925654 1747.521275149011 1995.802986372368 2501.915705404595 2998.479127851308 4001.155269330249 5003.83141080919] (по умолчанию) | vectorКоробка передач эффективности точки останова скорости, в рад/с.
Чтобы включить этот параметр, установите Transmission efficiency factors равным Gear, input torque, input speed, and temperature.
Типы данных: double
Transmission efficiency temperature breakpoints, Temp_trans_bpts - Точки останова температуры эффективности трансмиссии[313 358] (по умолчанию) | vectorТрансмиссия эффективности точки останова температуры, в К.
Чтобы включить этот параметр, установите Transmission efficiency factors равным Gear, input torque, input speed, and temperature.
Типы данных: double
Transmission efficiency vector, eta_trans_tbl - Вектор эффективности передачиarrayВектор эффективности передачи. Никаких размерностей.
Чтобы включить этот параметр, установите Transmission efficiency factors равным Gear, input torque, input speed, and temperature.
Типы данных: double
Speed breakpoints, f_tbrake_n_bpt - Точки останова скорости[0 750 1053.57142857143 1357.14285714286 1660.71428571429 1964.28571428571 2267.85714285714 2571.42857142857 2875 3178.57142857143 3482.14285714286 3785.71428571429 4089.28571428571 4392.85714285714 4696.42857142857 5000] (по умолчанию) | vectorТочки останова скорости, в об/мин.
Типы данных: double
Commanded torque breakpoints, f_tbrake_t_bpt - Командные точки останова крутящего момента[0 15 26.4285714285714 37.8571428571429 49.2857142857143 60.7142857142857 72.1428571428571 83.5714285714286 95 106.428571428571 117.857142857143 129.285714285714 140.714285714286 152.142857142857 163.571428571429 175] (по умолчанию) | vectorКомандные точки останова крутящего момента, в Н· м.
Типы данных: double
Brake torque map, f_tbrake - Карта момента приводаarrayКарта тормозного крутящего момента, в Н· м.
Типы данных: double
Minimum engine torque command table, f_tbrake_min - Таблица команд минимального крутящего момента двигателяvectorТаблица команд минимального крутящего момента двигателя, в Н· м.
Типы данных: double
Fuel flow map, f_fuel - Карта расхода топливаarrayКарта расхода топлива, в кг/с.
Типы данных: double
Minimum engine torque command, HEVEngTrq_min - Команда минимального крутящего момента двигателя16.18610438796213 (по умолчанию) | scalarКоманда минимального крутящего момента двигателя, в Н· м.
Типы данных: double
Fuel lower heating value, LHV - Нижнее значение нагрева топлива46000000 (по умолчанию) | scalarБолее низкое значение нагрева топлива, в Дж/кг.
Типы данных: double
Engine idle speed, N_idle - Скорость холостого хода Engine750 (по умолчанию) | scalarЧастота вращения Engine на холостом ходу, в об/мин.
Типы данных: double
Battery state-of-charge breakpoints, SOC_bpt - Точки останова состояния заряда батареи[0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1] (по умолчанию) | vectorТочки останова состояния заряда батареи. Никаких размерностей.
Типы данных: double
Battery charge limit table, ChrgLmt - Таблица пределов заряда батареи[1 1 1 1 1 1 1 0.9 0.7 0.5 0] (по умолчанию) | vectorТаблица пределов заряда батареи. Никаких размерностей.
Типы данных: double
Battery discharge limit table, DischrgLmt - Граничная таблица разряда батареи[0 0.5 0.7 0.9 1 1 1 1 1 1 1] (по умолчанию) | vectorПредел разряда батареи. Никаких размерностей.
Типы данных: double
Maximum battery current, BattCurrMax - Максимальный ток батареи150 (по умолчанию) | scalarМаксимальный ток батареи, в А.
Типы данных: double
DC/DC converter efficiency, eta_dcdc - эффективность преобразователя постоянного/постоянного тока1 (по умолчанию) | scalarЭффективность преобразователя постоянного тока/постоянного тока. Никаких размерностей.
Типы данных: double
Maximum battery charge power, BattChrgPwrMax - Максимальная степень заряда батареи-30000 (по умолчанию) | scalarМаксимальная степень заряда батареи, в Вт.
Типы данных: double
Maximum battery discharge power, BattDischrgPwrMax - Максимальная степень разряда батареи46000 (по умолчанию) | scalarМаксимальная степень разряда батареи, в Вт.
Типы данных: double
Motor maximum torque table, f_tmtr_max - Таблица максимального крутящего момента двигателяvectorТаблица максимального крутящего момента двигателя, в Н· м.
Типы данных: double
Motor speed breakpoints, f_mtr_w_bpt - Точки останова скорости двигателяvectorТочки останова скорости двигателя, в об/мин.
Типы данных: double
Motor torque breakpoints, f_mtr_t_bpt - Точки останова крутящего момента двигателяvectorТочки останова крутящего момента двигателя, в Н· м.
Типы данных: double
Motor efficiency map, f_mtr_eta - Карта эффективность мотораarrayКарта эффективность мотора. Никаких размерностей.
Типы данных: double
Number of motor torque calculation points, Ngrid - Количество точек вычисления крутящего момента двигателя200 (по умолчанию) | scalarКоличество точек вычисления крутящего момента двигателя. Никаких размерностей.
Типы данных: double
P0 belt ratio, N_P0 - P0 соотношение ремней3 (по умолчанию) | scalarP0 соотношение ремней. Никаких размерностей.
Чтобы включить этот параметр, установите Motor location равным P0.
Типы данных: double
ECMS weighting factor, ECMS_s - весовой коэффициент СКУ3.385 (по умолчанию) | scalarВесовой коэффициент CMS. Никаких размерностей.
Типы данных: double
Penalty factor power, PenaltyFctrPwr - степень штрафного фактора3 (по умолчанию) | scalarКоэффициент штрафа степени. Никаких размерностей.
Типы данных: double
Adaptive ECMS proportional gain, ECMS_Kp - Адаптивная пропорциональная пропорциональная составляющая ECMS0 (по умолчанию) | scalarАдаптивная пропорциональная составляющая ECMS. Никаких размерностей.
Чтобы включить этот параметр, установите ECMS method равным Adaptive.
Типы данных: double
Adaptive ECMS integral gain, ECMS_Ki - Адаптивная интегральная составляющая ECMS0 (по умолчанию) | scalarАдаптивная интегральная составляющая ECMS. Никаких размерностей.
Чтобы включить этот параметр, установите ECMS method равным Adaptive.
Типы данных: double
Constraint penalty factor, PenaltyFctr - Ограничительный штрафной коэффициент10000000 (по умолчанию) | scalarОграничительный штрафной коэффициент. Никаких размерностей.
Типы данных: double
Target battery state-of-charge, SOCTrgt - Целевое состояние заряда батареи60 (по умолчанию) | scalarЦелевое состояние заряда батареи. Никаких размерностей.
Типы данных: double
Minimum battery state-of-charge, SOCmin - Минимальное состояние заряда батареи40 (по умолчанию) | scalarМинимальное состояние заряда батареи. Никаких размерностей.
Типы данных: double
Maximum battery state-of-charge, SOCmax - Максимальное состояние заряда батареи80 (по умолчанию) | scalarМаксимальное состояние заряда батареи. Никаких размерностей.
Типы данных: double
MathWorks® хотел бы отметить вклад доктора Симоны Онори в оптимальный алгоритм управления ECMS, реализованную в этом блоке. Доктор Онори является профессором инженерии энергетических ресурсов в Стэнфордском университете. Ее научные интересы включают электрохимическое моделирование, оценку и оптимизацию устройств накопления энергии для автомобильных и сетевых приложений, моделирование и управление гибридными и электромобилями, моделирование PDE, а также уменьшение порядка модели и оценку систем снижения выбросов. Она является старшим представителем IEEE®.
[1] Balazs, A., Morra, E., and Pischinger, S., Optimization of Electrified Powertrains for City Cars. Технический документ SAE 2011-01-2451. Warrendale, PA: SAE International Journal of Alternative Powertrains, 2012.
[2] Onori, S., Serrao, L., and Rizzoni, G., Hybrid Electric Vehicles Energy Management Systems. Нью-Йорк: Спрингер, 2016.