Трехфазный асинхронный двигатель
Блоксет силовых агрегатов/Двигатели/Электродвигатели и инверторы
Блок управления двигателем/Электрические системы/Двигатели
Блок Induction Motor реализует трехфазный асинхронный двигатель. Блок использует трехфазные входные напряжения, чтобы регулировать отдельные токи фазы, позволяя контролировать крутящий момент или скорость двигателя.
По умолчанию блок устанавливает параметр Simulation Type равным Continuous использование непрерывного шага расчета во время симуляции. Если вы хотите сгенерировать код для целей с двойной и одинарной точностью с фиксированным шагом, рассматривая установка параметра Discrete. Затем задайте параметр Sample Time, Ts.
Блок реализует уравнения, которые выражены в ссылку стационарного ротора (qd) системы координат. Ось D выравнивается по оси A. Все величины в исходной системе координат ротора относятся к статору.
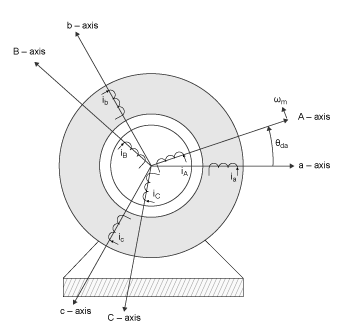
Блок использует эти уравнения, чтобы вычислить электрическую скорость (ωem) и скольжение (ωslip).
Чтобы вычислить электрическую скорость dq ротора относительно оси A ротора (dA), блок использует различие между скоростью a- da статора и скоростью скольжения:
Чтобы упростить уравнения для преобразования потока, напряжения и тока, блок использует стационарную систему координат:
| Вычисление | Уравнение |
|---|---|
| Поток |
|
| Ток |
|
| Индуктивность |
|
| Электромагнитный крутящий момент |
|
Преобразование Power invariant dq, чтобы гарантировать, что dq и три степени фазы равны |
|
В уравнениях используются эти переменные.
ωm | Скорость вращения ротора (рад/с) |
ωem | Скорость электрического ротора (рад/с) |
ωslip | Скорость скольжения электрического ротора (рад/с) |
ωsyn | Синхронная скорость ротора (рад/с) |
ωda | dq электрическая скорость статора относительно оси А ротора (рад/с) |
ωdA | dq электрическая скорость статора относительно оси A ротора (рад/с) |
Θda | dq электрический угол статора относительно оси A ротора (рад) |
ΘdA | dq электрический угол статора относительно оси А ротора (рад) |
Lq, Ld | q- и d-индуктивности (H) |
Ls | Индуктивность статора (H) |
Lr | Индуктивность ротора (H) |
Lm | Индуктивность намагничивания (H) |
Lls | Индуктивность утечек статора (H) |
Llr | Индуктивность утечек ротора (H) |
vsq, vsd | Напряжения q- и d-осей статора (V) |
isq, isd | Токи q- и d-осей статора (A) |
λsq, λsd | Поток статора q- и d-осей (Wb) |
irq, ird | Токи ротора q- и d-осей (A) |
λrq, λrd | Поток ротора q- и d-осей (Wb) |
| va, vb, vc | Фазы напряжения статора a, b, c (V) |
| ia, ib, ic | Токи статора, фазы a, b, c (A) |
Rs | Сопротивление обмоток статора (Ом) |
Rr | Сопротивление обмоток ротора (Ом) |
P | Количество пар полюсов |
Te | Электромагнитный крутящий момент (Nm) |
Скорость вращения двигателя задается:
В уравнениях используются эти переменные.
J | Комбинированная инерция двигателя и нагрузки (кгм ^ 2) |
F | Комбинированное вязкое трение двигателя и нагрузки (Н· м/( рад/с)) |
θm | Механическое угловое положение мотора (рад) |
Tm | Крутящий момент на валу мотора (Nm) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Момент трения вала мотора (Nm) |
ωm | Угловая механическая скорость двигателя (рад/с) |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая степень | Pmot | |
PwrBus | Электрическая степень | Pbus | |||
|
| PwrElecLoss | Сопротивление потери степени | Pelec | ||
PwrMechLoss | Механические потери степени | Pmech | Когда Port Configuration установлено на Когда Port Configuration установлено на | ||
|
| PwrMtrStored | Сохраненная степень мотора | Pstr | ||
В уравнениях используются эти переменные.
Rs | Сопротивление статора (Ом) |
Rr | Сопротивление мотора (Ом) |
ia, ib, ic | Фазы статора a, b и тока c (A) |
isq, isd | Токи q- и d-осей статора (A) |
van, vbn, vcn | Фазы статора a, b и напряжения c (V) |
ωm | Угловая механическая скорость ротора (рад/с) |
F | Комбинированный двигатель и вязкое демпфирование нагрузки (Н· м/( рад/с)) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Комбинированный двигатель и крутящий момент трения нагрузки (Nm) |
[1] Mohan, Ned. Усовершенствованные электроприводы: Анализ, управление и моделирование с помощью Simulink. Миннеаполис, MN: MNPERE, 2001.
Flux-Based PMSM | IM Controller | Interior PMSM | Mapped Motor | Surface Mount PMSM
