Трехфазный синхронный двигатель с внешними постоянными магнитами с синусоидальной противоэлектродвижущей силой
Блоксет силовых агрегатов/Двигатели/Электродвигатели и инверторы
Блок управления двигателем/Электрические системы/Двигатели
Блок Surface Mount PMSM реализует трехфазный синхронный двигатель с внешней установкой постоянных магнитов (PMSM) с синусоидальной противоэлектродвижущей силой. Блок использует трехфазные входные напряжения, чтобы регулировать отдельные токи фазы, позволяя контролировать крутящий момент или скорость двигателя.
По умолчанию блок устанавливает параметр Simulation type равным Continuous использование непрерывного шага расчета во время симуляции. Если вы хотите сгенерировать код для целей с двойной и одинарной точностью с фиксированным шагом, рассматривая установка параметра Discrete. Затем задайте параметр Sample Time, Ts.
На вкладке Parameters, если вы выбираете Back-emf или Torque constantблок реализует одно из этих уравнений, чтобы вычислить постоянную константу редактирования.
| Настройка | Уравнение |
|---|---|
Back-emf | |
Torque constant |
Этот рисунок показывает конструкцию мотора с одной полюсной парой на моторе.
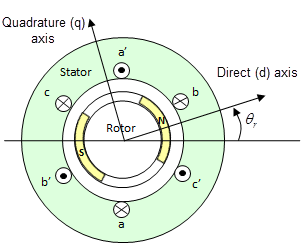
Магнитное поле двигателя от постоянных магнитов создает синусоидальную скорость изменения потока с углом двигателя.
Для соглашения о осях a-фазы и потоки постоянных магнитов выравниваются, когда угол θr мотора равен нулю.
Блок реализует эти уравнения, выраженные в исходной системе координат потока двигателя (dq-система координат). Все величины в исходной системе координат электродвигателя относятся к статору.
Lq и Ld индуктивности представляют отношение между индуктивностью фазы и положением двигателя из-за салиентности магнитов мотора. Для поверхностного монтажа PMSM, .
В уравнениях используются эти переменные.
Lq, Ld | q- и d-индуктивности (H) |
R | Сопротивление обмоток статора (ом) |
iq, id | токи q- и d-осей (A) |
vq, vd | q- и d-осевые напряжения (V) |
ωm | Угловая механическая скорость двигателя (рад/с) |
ωe | Угловая электрическая скорость двигателя (рад/с) |
λpm | Поток постоянных магнитов редактирования (Wb) |
| Ke | Противоэлектродвижущая сила (ЭДС) (Vpk_LL/krpm, где Vpk_LL - линейное пиковое измерение напряжения) |
Kt | Крутящий момент константа (N· m/A) |
P | Количество пар полюсов |
Te | Электромагнитный крутящий момент (Nm) |
Θe | Электрический угол (рад) |
Скорость вращения двигателя задается:
В уравнениях используются эти переменные.
J | Комбинированная инерция двигателя и нагрузки (кгм ^ 2) |
F | Комбинированное вязкое трение двигателя и нагрузки (Н· м/( рад/с)) |
θm | Механическое угловое положение мотора (рад) |
Tm | Крутящий момент на валу мотора (Nm) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Момент трения вала мотора (Nm) |
ωm | Угловая механическая скорость двигателя (рад/с) |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая степень | Pmot | |
PwrBus | Электрическая степень | Pbus | |||
|
| PwrElecLoss | Сопротивление потери степени | Pelec | ||
PwrMechLoss | Механические потери степени | Pmech | Когда Port Configuration установлено на Когда Port Configuration установлено на | ||
|
| PwrMtrStored | Сохраненная степень мотора | Pstr | ||
В уравнениях используются эти переменные.
Rs | Сопротивление статора (ом) |
ia, ib, ic | Фазы статора a, b и тока c (A) |
isq, isd | Токи q- и d-осей статора (A) |
van, vbn, vcn | Фазы статора a, b и напряжения c (V) |
ωm | Угловая механическая скорость двигателя (рад/с) |
F | Комбинированный двигатель и нагрузка вязкого демпфирования N· m/( рад/с) |
Te | Электромагнитный крутящий момент (Nm) |
Tf | Комбинированный двигатель и крутящий момент трения нагрузки (Nm) |
[1] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, Нью-Йорк: McGraw Hill, 1993.
[2] Андерсон, П. М. Анализ неисправных степеней. Hoboken, NJ: Wiley-IEEE Press, 1995.
Flux-Based PMSM | Induction Motor | Interior PMSM | Mapped Motor | Surface Mount PM Controller
