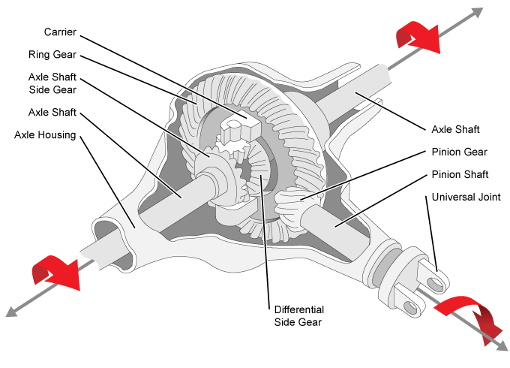
Дифференциал как планетарная коническая передача
Блок силового агрегата/Привод/Блок последнего привода
Динамика автомобиля Blockset/Powertrain/Drivetrain/Final Drive Unit
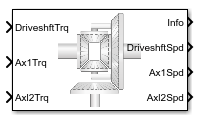
Блок Open Differential реализует дифференциал как планетарный конический train. Блок соответствует конической шестерне ведущего вала коронной (кольцевой) шестерне. Можно задать:
Отношение несущей частоты к валу привода
Расположение коронного колеса
Вязкий и коэффициенты демпфирования для осей и носителя
Используйте блок Open Differential для:
Динамически соедините приводной вал после трансмиссии с осями колес или универсальными шарнирами
Моделируйте упрощённые или старые ходовые части, когда оптимальное регулирование тяги не требует пассивного или активного векторизации крутящего момента
Моделируйте механическое разделение степени в типовых сценариях коробки передач и приводной линии
Блок подходит для использования в рабочих процессах оборудования-в-цикле (HIL) и оптимизации. Все параметры настраиваются.
Блок использует систему координат, которая производит положительное движение шины и транспортного средства для стандартных строений двигателя, трансмиссии и дифференциальных. Стрелы указывают на положительное движение.
Для расчета эффективности блока используйте параметр Efficiency factors. В этой таблице суммируется реализация блоков для каждой настройки.
| Настройка | Реализация |
|---|---|
| Постоянная эффективность, которую можно задать с помощью параметра Constant efficiency factor, eta. |
| Эффективность как функция входного крутящего момента базовой передачи, температуры воздуха и скорости привода. Используйте эти параметры для задания интерполяционной таблицы и точек по оси Х:
Для температуры воздуха можно либо:
Чтобы выбрать метод интерполяции, используйте параметр Interpolation method. Для получения дополнительной информации см. «Методы интерполяции». |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Механическая степень от приводного вала | |
| Механическая степень от оси 1 | |||
| Механическая степень от оси 2 | |||
|
|
| Суммарные потери степени | ||
| Потеря степени из-за демпфирования | |||
|
|
| Изменение скорости сохраненной внутренней энергии | ||
Блок Open Differential реализует эти дифференциальные уравнения, чтобы представлять механическую динамическую характеристику для коронной передачи, левой оси и правой оси.
| Механическая динамическая характеристика | Дифференциальное уравнение |
|---|---|
| Коронная Передача |
|
| Левая ось |
|
| Правая ось |
|
Блок Open Differential принимает жесткую связь между коронной шестерней и осями. Эти ограничительные уравнения применяются.
В уравнениях используются эти переменные.
| N | Передаточное отношение водила к приводу |
| Jd | Инерция вращения узла коронной передачи |
| bd | Линейно-вязкое демпфирование коронной передачи |
| ωd | Угловая скорость привода |
| η | Дифференциальная эффективность |
| J1 | Инерция вращения оси 1 |
| b1 | Линейно-вязкое демпфирование оси 1 |
| ω1 | Скорость оси 1 |
| J2 | Инерция вращения оси 2 |
| b2 | Линейно-вязкое демпфирование оси 2 |
| ω2 | Угловая скорость оси 2 |
| Td | Крутящий момент на валу привода |
| T1 | Крутящий момент оси 1 |
| T2 | Крутящий момент оси 2 |
| Ti | Крутящий момент внутреннего сопротивления приводного вала |
| Ti1 | Крутящий момент внутреннего сопротивления оси 1 |
| Ti2 | Крутящий момент внутреннего сопротивления оси 2 |
