В Simulink®можно смоделировать программный компонент AUTOSAR, в котором асинхронный вызов функции, выполняемый, взаимодействует с периодическими runnables на основе скорости. Этот тип компонента использует как периодические, так и асинхронные скорости ( шаги расчета).
Подход может использоваться, чтобы смоделировать архитектуру beta (β) модели комплексного управления JMAAB. Эта архитектура описана в Руководстве по моделированию алгоритма управления документом с использованием MATLAB, Simulink и Stateflow, которое доступно из MathWorks® веб-сайт в https://www.mathworks.com/solutions/mab-guidelines.html.
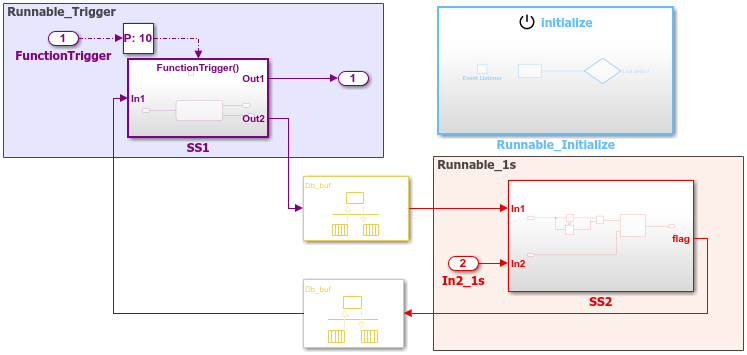
В моделировании бета-типа JMAAB, на верхнем уровне модели управления, вы помещаете слои функций выше слоев планирования. Например, вот пример модели AUTOSAR, autosar_swc_fcncalls. В этой модели асинхронный вызов функции, выполняемый на верхнем уровне модели, взаимодействует с периодическим выполняемым вызовом на основе скорости.
Некоторые рекомендации применяются к моделированию AUTOSAR типа бета- контроллера JMAAB размещения:
IRV должны быть смоделированы блоками Rate Transition.
Подсистемы вызова функций должны иметь асинхронные скорости. (В function-call подсистеме Trigger block Sample time type должны срабатывать, а не периодически.)
Для каждой асинхронной подсистемы вызова функций необходимо вставить блок задачи Asynchronous Task Спецификации между корневым входным портом вызова функции и подсистемой.
Вот представление Runnables в словаре AUTOSAR. Событие запускает асинхронный вызов функции, выполняемый. Событие должно иметь тип DataReceivedEvent, DataReceiveErrorEvent, ModeSwitchEvent, InitEvent, или ExternalTriggerOccurredEvent.
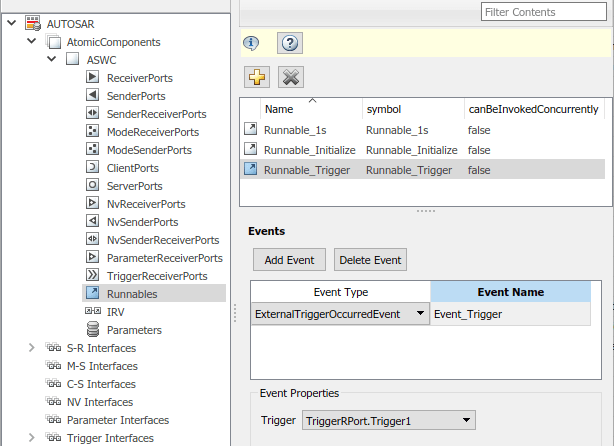
В этом примере ExternalTriggerOccurredEvent активизирует возможность выполнения AUTOSAR. Интерфейс триггера доставляет событие в порт приемника триггера. Для получения дополнительной информации о ExternalTriggerOccurredEvents, см. «Настройка приемника для передачи событий внешнего триггера AUTOSAR».
Вот представление редактора Отображения функций точки входа Simulink. Функции сопоставлены с function-триггером, инициализацией и периодическими выполняемыми функциями AUTOSAR, соответственно.

Rate Transition | Asynchronous Task Specification (Simulink Coder)
