Программное обеспечение AUTOSAR Blockset поддерживает моделирование компонентов программного обеспечения AUTOSAR для адаптивной платформы AUTOSAR. Разработка адаптивного программного компонента AUTOSAR в Simulink®, создайте модель Simulink, которая представляет адаптивный программный компонент AUTOSAR. Инициируйте создание модели одним из следующих способов:
Импортируйте существующее описание компонента AUTOSAR XML (ARXML) в окружение Simulink как модель. Описание компонента импортируется с помощью импортера AUTOSAR ARXML.
Переделайте существующую модель Simulink в представление адаптивного программного компонента AUTOSAR.
Начиная с шаблона модели AUTOSAR Blockset, создайте модель Simulink.
После создания начального проекта модели уточните алгоритмическое содержимое.
В этом руководстве показана выборка модели адаптивного программного компонента AUTOSAR.
Откройте LaneGuidance модели.
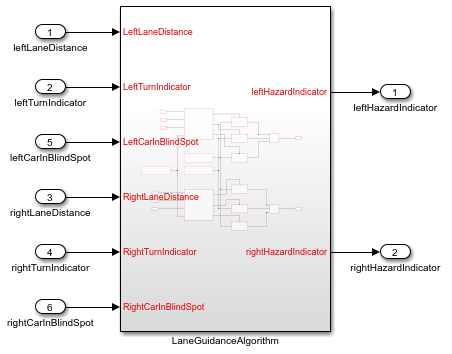
Исследуйте модель. Он состоит из подсистемы, LaneGuidanceAlgorithm. Подсистема имеет шесть входных портов, которые представляют необходимые порты адаптивного программного компонента AUTOSAR: leftLaneDistance, leftTurnIndicator, leftCarInBlindSpot, rightLaneDistance, rightTurnIndicator, и rightCarInBlindSpot. Два выхода представляют порты провайдера: leftHazardIndicator и rightHazardIndicator.
Установите System target file параметра конфигурации модели в autosar_adaptive.tlc. Эта системная настройка целевого файла позволяет использовать программное обеспечение AUTOSAR Blockset и влияет на другие настройки параметра конфигурации модели. Для примера:
Language установлено на C++.
Generate code only выбран.
Toolchain установлено на AUTOSAR Adaptive | CMake.
Code interface packaging установлено на C++ class.
На верхнем уровне модели настройте основанную на событиях коммуникацию. Адаптивный программный компонент AUTOSAR предоставляет и использует услуги. Каждый компонент содержит:
Алгоритм, который выполняет задачи в ответ на полученные события
Требуемые и предоставляемые порты, каждый из которых сопоставлен с сервисным интерфейсом
Сервисные интерфейсы со связанными событиями и связанными пространствами имен
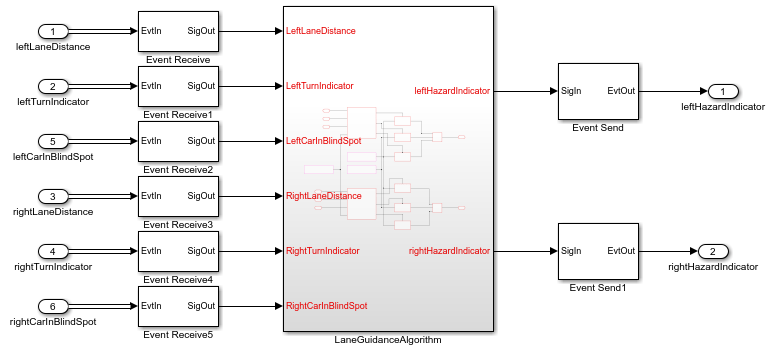
AUTOSAR Blockset обеспечивает Event Receive и Event Send блоки для создания необходимых событий и сигнальных соединений.
После каждого корневого входного порта добавьте блок Event Receive, который преобразует событие входа в сигнал с сохранением типа значений сигналов и данных.
Перед каждым корневым выходом добавьте блок Event Send, который преобразует входной сигнал в событие с сохранением типа значений сигналов и данных.
Чтобы ускорить вставку блоков, можно скопировать блоки событий из завершенной версии модели примера autosar_LaneGuidance.
Исследуйте строение модели. Настройки решателя:
Type установлено на Fixed-step.
Solver установлено на auto (Automatic solver selection).
Fixed-step size (fundamental sample time) установлено на 1/10.
Periodic same time constraint установлено на Unconstrained.
В Simulink Editor можно включить шаг расчета код цвета, выбрав вкладку Debug и выбрав Diagnostics > Information Overlays > Colors. Шаг расчета показывает неявную группировку скорости. Легенда для этой модели показывает, что модель использует одну скорость 0,1 секунды. Модель моделируется в однозадачном режиме.
Сохраните модель в папку с возможностью записи на текущем MATLAB® путь поиска файлов. Назовите файл my_autosar_LaneGuidance.slx.
Затем сконфигурируйте элементы адаптивного программного компонента AUTOSAR для использования в среде моделирования Simulink.
