В Simulink®можно гибко моделировать структуру и поведение компонентов программного обеспечения для адаптивной платформы AUTOSAR.
Адаптивная платформа AUTOSAR определяет сервисно-ориентированную архитектуру для автомобильных компонентов, которая должна гибко адаптироваться к внешним событиям и условиям. По сравнению с AUTOSAR Classic Platform адаптивная платформа требует:
Высокопроизводительные вычисления, потенциально с несколькими ядрами и неоднородными типами процессоров.
Быстрая связь, потенциально с Ethernet или сетями на чипах.
Сильное сервисное взаимодействие между компонентами.
Возможность адаптировать работающие автомобильные приложения к внешним событиям и источникам информации (потенциально для вождения с высокой степенью автоматизации), а также к внешним коммуникациям, мониторингу и обновлениям программного обеспечения в реальном времени.
Адаптивная система AUTOSAR потенциально содержит несколько взаимосвязанных компонентов адаптивного программного обеспечения. Адаптивные программные компоненты развертываются в среде выполнения, заданной в Adaptive Platform, AUTOSAR Runtime for Adaptive Applications (ARA).
Адаптивный программный компонент AUTOSAR предоставляет и использует услуги. Адаптивная архитектура услуг является гибкой, масштабируемой и распределенной. Услуги могут быть обнаружены динамически и могут запускаться на локальных или удаленных электронных модулях управления (ECU). Каждый программный компонент содержит:
Автомобильный алгоритм, который выполняет задачи в ответ на полученные события.
Требуемые и предоставленные порты, каждый из которых сопоставлен с сервисным интерфейсом, через который принимаются и отправляются события.
Сервисные интерфейсы, которые обеспечивают среду для обмена данными на основе событий, и связанные с ними события и пространства имен.
Чтобы смоделировать адаптивный программный компонент AUTOSAR в Simulink, вы начинаете с модели, которая содержит автомобильный алгоритм. Из этой модели вы генерируете словарь AUTOSAR, который задает сервисные интерфейсы, и перспективу кода AUTOSAR, которая сопоставляет элементы модели Simulink с элементами компонента AUTOSAR. Когда вы дополнительно разрабатываете и уточняете адаптивный компонент в Simulink, можно итерационно моделировать и создавать модель.
Когда вы завершаете реализацию компонента, можно объединить модель адаптивного программного компонента с другими моделями компонента в модели контейнера симуляции уровня приложения. Конечная цель состоит в том, чтобы развернуть компонент как часть приложения в среде ARA.
Вот высокоуровневый рабочий процесс компонентов программного обеспечения на основе адаптивной платформы AUTOSAR.
Откройте модель Simulink, которая либо пуста, либо содержит функциональный алгоритм.
Используя диалоговое окно Model Параметры Конфигурации, сконфигурируйте модель для адаптивной генерации кода AUTOSAR. Установите System target file значение autosar_adaptive.tlc.
Разработайте алгоритмическое содержимое модели для использования в адаптивном программном компоненте AUTOSAR. Если модель пуста, создайте или скопируйте в алгоритме. Возможные источники для алгоритмов включают алгоритмические элементы в других моделях Simulink. Примеры включают подсистемы, ссылочные модели, блоки MATLAB Function и блоки C Caller.
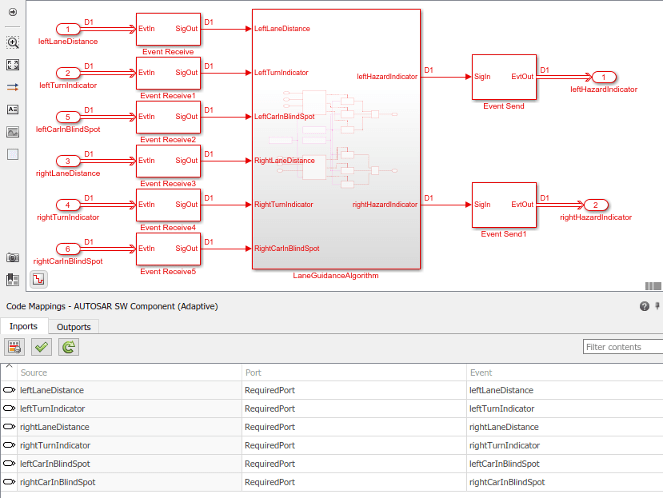
На верхнем уровне модели настройте основанную на событиях коммуникацию.
После каждого корневого входного порта добавьте блок Event Receive, который преобразует событие входа в сигнал с сохранением типа значений сигналов и данных.
Перед каждым корневым выходом добавьте блок Event Send, который преобразует входной сигнал в событие с сохранением типа значений сигналов и данных.
Сопоставьте модель алгоритма с адаптивным программным компонентом AUTOSAR. Для примера на вкладке Apps нажмите AUTOSAR Component Designer. Поскольку модель не сопоставлена, откроется окно AUTOSAR Component Quick Start.
Пройдите процедуру quick-start. Щелкните Finish, чтобы сопоставить модель. Модель откроется в перспективе кода AUTOSAR.
Используя перспективу кода AUTOSAR и словарь AUTOSAR (или эквивалентные функции AUTOSAR map и свойства), дополнительно доработайте строение адаптивной модели AUTOSAR.
В перспективе кода AUTOSAR исследуйте отображение входных и выходных портов Simulink с необходимыми и предоставленными портами и событиями AUTOSAR.
В словаре AUTOSAR проверьте свойства AUTOSAR для RequiredPorts, ProvidedPorts и Service Interfaces.
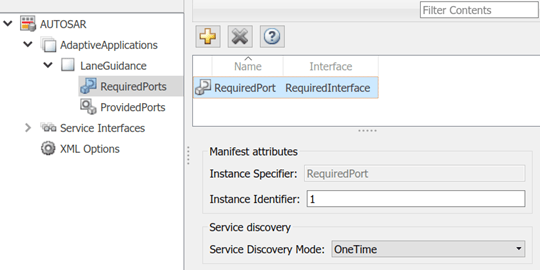
Можно развернуть узлы сервисного интерфейса, чтобы изучить связанные с ними события AUTOSAR и задать пространства имен для Кода С++ интерфейса.
Создайте модель адаптивного программного компонента AUTOSAR. Создание модели генерирует:
Файлы C++, которые реализуют алгоритмы модели для адаптивной платформы AUTOSAR и предоставляют определения типов разделяемых данных.
Авто-РСА XML адаптивного программного компонента AUTOSAR и сведения о манифесте для развертывания приложений и строения услуг.
Файлы C++, которые реализуют основной программный модуль.
Файлы заголовка окружения AUTOSAR Runtime Adaptive (ARA).
CMakeLists.txt файл, который поддерживает генерацию исполняемых файлов CMake.
Дополнительные сведения см. в разделе Настройка адаптивных программных компонентов AUTOSAR.
