Вычисление области значений и угла
Функция rangeangle определяет длину пути распространения и направление пути сигнала от исходной точки или набора исходных точек до ссылки точки. Функция поддерживает две модели распространения - модель свободного пространства и модель с двумя лучами. Модель свободного пространства является одной линией зрения, пути от исходной точки до ссылки точки. Двухлучевая многолучевая модель генерирует два пути. Первый путь следует по пути свободного пространства. Второй путь является отраженным путем от пограничной плоскости при z = 0. Пути направления заданы относительно либо глобальной системы координат в ссылку точке, либо локальной системы координат в ссылку точке. Расстояния и углы в контрольной точке не зависят от направления движения сигнала вдоль пути.
[ возвращает длину пути распространения, rng,ang]
= rangeangle(pos)rng, и углы направления, ang, сигнального пути от исходной точки или набора исходных точек, pos, на источник глобальной системы координат. Углы направления являются азимутом и повышением относительно глобальных осей координат в источник. Сигналы следуют по пути видимости от исходной точки до источник. Путь линии визирования соответствует геометрической прямой линии между точками.
[ также задает ссылку точку или набор ссылки точек, rng,ang]
= rangeangle(pos,refpos)refpos. rng теперь содержит длину пути распространения от исходных точек до контрольных точек. Углы направления являются азимутом и повышением относительно глобальных осей координат в контрольных точках. Можно задать несколько точек и несколько ссылочных точек.
[, также задает модель распространения. Когда rng,ang]
= rangeangle(___,model)model установлено в 'freespace'сигнал распространяется вдоль пути видимости от точки источника до точки приема. Когда model установлено в 'two-ray'сигнал распространяется по двум путям от точки источника до точки приема. Первый путь является траекторией видимости. Второй путь является отражающим путем. В этом случае функция возвращает расстояния и углы для двух путей для каждой исходной точки и соответствующей контрольной точки.
|
Положение исходной точки, заданное как действительный вектор 3 на 1 или вещественная 3-бай- N матрица. Матрица представляет несколько исходных точек. Столбцы содержат Декартовы координаты N точек в форме Когда Позиционные модули - метры. |
|
Положение опорной точки, заданное как действительный вектор 3 на 1 или вещественная 3-бай- N матрица. Матрица представляет несколько ссылочных точек. Столбцы содержат Декартовы координаты N точек в форме Когда Позиционные модули - метры. По умолчанию: |
|
Оси локальной системы координат, заданные как матрица с реальным значением 3 на 3 или массив N 3 на 3 байта. Для массива каждая страница соответствует локальным осям координат в каждой ссылочной точке. Столбцы в По умолчанию: |
|
Модель распространения, заданная как По умолчанию: |
|
Область значений распространения, возвращенный как действительный вектор 1- N или действительный вектор 1- 2N . Когда Когда |
|
Азимут и углы возвышения, возвращенные как 2-бай- N матрица или 2-бай- 2N матрица. Каждый столбец представляет угол направления в Когда Когда Угловые модули находятся в степенях. |
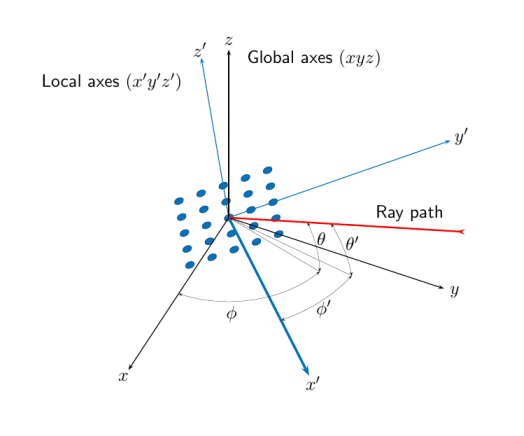
rangeangle функция возвращает расстояние и углы пути в глобальной или локальной системах координат. По умолчанию, rangeangle функция определяет угол, который задает путь сигнала относительно глобальных координат. Если вы добавляете refaxes аргумент, можно вычислить углы относительно локальных координат. В качестве иллюстрации этот рисунок показывает равномерный прямоугольный массив (URA) 5 на 5, повернутую от глобальных координат (xyz) помощи refaxes. Ось x' локальной системы координат (x'y'z') выровнена по основной оси массива и перемещается при перемещении массива. Длина пути не зависит от ориентации. Глобальная система координат определяет азимут и углы повышений (Φ,θ) а локальная система координат определяет азимут и углы повышений (Φ',θ').
Локальная и глобальная ось координат
Двухлучевой канал распространения является следующим шагом вверх по сложности от канала свободного пространства и является простейшим случаем многолучевого окружения распространения. Канал свободного пространства моделирует прямолинейный путь наблюдения от точки 1 до точки 2. В двухлучевом канале среда задается как однородная, изотропная среда с отражающим планарным контуром. Значение контура всегда устанавливается на z = 0. Существует не более двух лучей, распространяющихся от точки 1 до точки 2. Первый путь луча распространяется вдоль того же пути видимости, что и в канале свободного пространства. Линейный путь часто называют прямой путь. Второй луч отражается вне контура перед распространением в точку 2. Согласно Закону Отражения, угол отражения равен углу падения. В ближних симуляциях, таких как сотовые коммуникационные системы и автомобильные радары, можно предположить, что отражающая поверхность, земля или поверхность океана, плоская.
Рисунок иллюстрирует два пути распространения. Из исходной позиции, ss и позиции приемника, sr, можно вычислить углы прихода обоих путей, θ′los и θ′rp. Углы прихода являются углами повышения и азимута поступающего излучения относительно локальной системы координат. В этом случае локальная система координат совпадает с глобальной системой координат. Можно также вычислить углы передачи, θlos и θrp. В глобальных координатах угол отражения на контуре совпадает с углами θrp и θ′rp. Угол отражения важно знать, когда вы используете зависящие от угла данные отражений и потерь. Можно определить угол отражения при помощи rangeangle (Phased Array System Toolbox) и установка ссылочных осей в глобальную систему координат. Общая длина пути для линии визирования показана на рисунке по Rlos, которая равна геометрическому расстоянию между источником и приемником. Общая длина пути для отраженного пути Rrp= R1 + R2. Количественный L является наземной областью значений между источником и приемником.
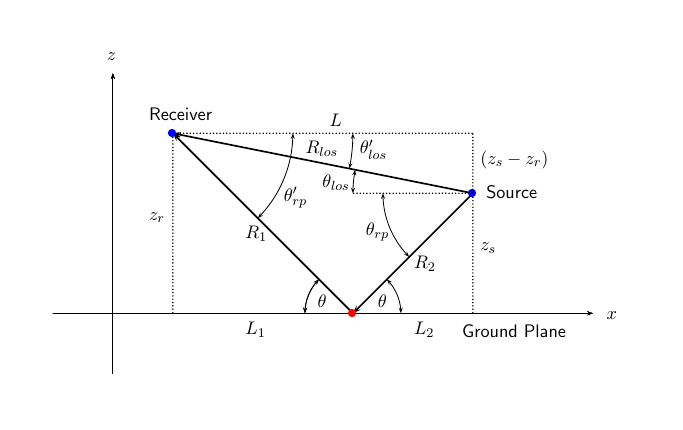
Можно легко вывести точные формулы для длин и углов пути с точки зрения области значений земли и высот объектов в глобальной системе координат.
