Bluetooth® технология [1] использует радиочастоту малой мощности для обеспечения связи малой дальности при низкой стоимости. Спецификация ядра Bluetooth [2], предоставленная Bluetooth Special Interest Group (SIG), добавила функцию определения местоположения и направления в Bluetooth с низкой энергией (BLE). Связь в BLE реализуется с использованием этих двух различных физических слоев (PHY).
LE Uncoded: Этот PHY далее сегрегируется на LE 1M PHY и LE 2M PHY. LE 1M является PHY по умолчанию и обеспечивает скорость символа 1 Msym/s. Поддержка LE- 1M обязательна во всех устройствах, поддерживающих BLE. LE 2M обеспечивает скорость символа 2 Msym/s. Поддержка LE- 2M опциональна для устройств, поддерживающих контроллер BLE.
LE Coded: Этот PHY оборудован для более длительной связи. Это может увеличить область значений в четыре раза, который может быть достигнут при уменьшении скорости передачи данных. Поддержка LE-кодированного PHY опциональна для устройств, поддерживающих контроллер BLE.
При нахождении направления Bluetooth могут использоваться LE 1M или LE 2M PHY, но не LE-кодированный PHY.
В течение нескольких лет Bluetooth использовался для предоставления различных видов услуг по поиску местоположения и направления. На высоком уровне эти услуги можно разделить на две категории.
Решения по близости: Эта категория состоит из точки интересных информационных приложений (для примера, музеев, которые предоставляют пользователю информацию об артефактах в помещении). Эта категория также включает решения по поиску элементов, такие как теги Bluetooth, которые помогают находить потерянные или неправильно размещенные элементы. В этих решениях теги Bluetooth периодически передают широковещательные системы координат BLE. Точка доступа (AP) сканирует эти системы координат, чтобы получить информацию о теге Bluetooth и отправляет ее на сервер местоположения через контроллер доступа (AC). В приложениях близости PoI необходимо определить, какая точка или PoIs находится в непосредственной близости от вычисленного местоположения.
Системы позиционирования: Эта категория включает услуги, основанные на местоположении, для использования Bluetooth для поиска физического положения устройства. Заметными примерами примеров использования в этой категории являются системы определения местоположения в реальном времени, используемые для отслеживания активов, отслеживания людей и системы позиционирования внутри помещений, используемые для обеспечения решений по траектории, которые помогают людям перемещаться по сложным сценариям внутри помещений. Случаи использования внутреннего позиционирования нуждаются в приложениях, которые оценивают точное местоположение маяков, с которыми они сталкиваются, так что может быть вычислено местоположение отслеживаемого устройства, соответствующего известному местоположению маяка. В некоторых случаях положение маяка может потребоваться определить в трёх размерностях, учитывая его x - и y - координаты в горизонтальной плоскости и его повышение выше или ниже некоторой эталонной высоты. Приложение может определить положение своего главного устройства только, если оно знает направление, с которого поступает принятый сигнал, приблизительное расстояние до этого маяка и местоположение маяка.
В приложениях с участием смартфонов при вычислении направления сигнала приложение должно учитывать ориентацию в трехмерном пространстве телефона.
Помимо вышеупомянутых услуг по поиску местоположения, сами приложения должны принимать эти общие факторы.
Определение деталей антенной решетки: Чтобы точно получить и обработать выборочные данные IQ, приложения должны иметь детали антенной решетки в локальном устройстве (для угла прибытия (AoA)) или удаленном устройстве (угол отправления (AoD)). Профили приложения описывают, как приложения могут получить описание антенной решетки от удаленных устройств. Ожидайте появления API для получения подробной информации об антенных решетках в локальных и удаленных устройствах.
Конфигурирование параметров расширения постоянного тонального сигнала (CTE): Такие параметры, как длина CTE, длина шаблона переключения антенны и количество пакетов, которые включают CTE для передачи за периодическое рекламное событие, управляют производством CTE. Эти параметры могут быть установлены с помощью новых команд интерфейса контроллера хоста (HCI).
Настройка и включение выборки IQ: Спецификация Bluetooth Core [2] задает ряд параметров для настройки и запуска выборки IQ. Эти параметры включают длительность паза дискретизации (1 мкс или 2 мкс), длину шаблона переключения и идентификаторы антенн, которые должны быть включены в шаблон дискретизации.
Разработка алгоритмов и вычисление углов из выборочных данных IQ: Bluetooth SIG не определяет какой-либо конкретный алгоритм в качестве стандартного алгоритма поворота. Выбор алгоритма оставлен на прикладном слое для обращения. Как правило, это область, в которой конкурируют производители и разработчики.
Технология Bluetooth-маяк является приложением стандарта BLE. Маяк транслирует отдельный идентификатор. Приложение на устройстве BLE, принимающем этот идентификатор, просматривает базу данных, чтобы распознать передающий маяк, и затем предоставляет пользователю информацию, относящуюся к местоположению этого маяка. Этот рисунок показывает методы, используемые для оценки расстояния между устройством BLE и маяком.
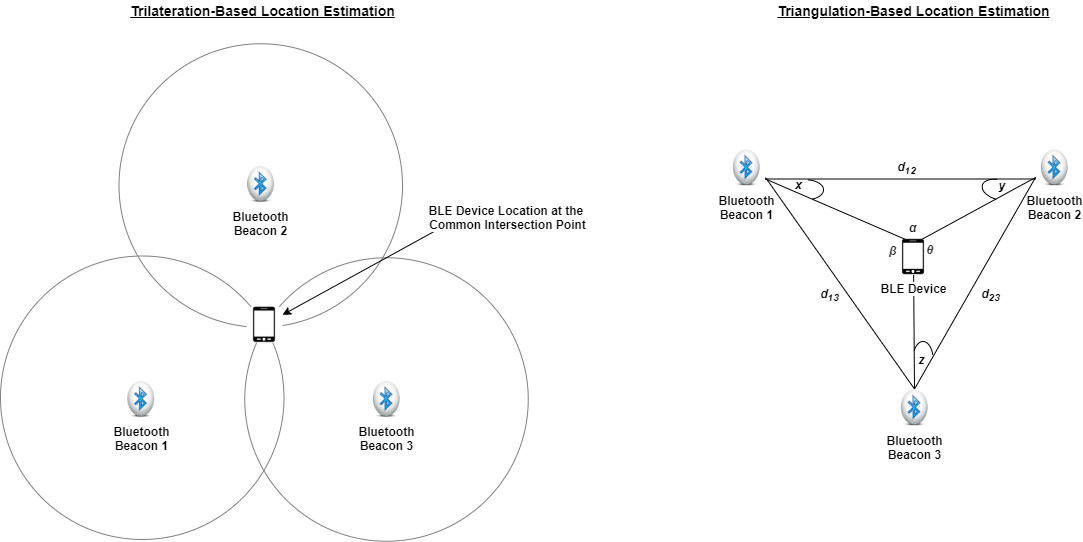
Основанная на трилатерации оценка местоположения: Трилатерация является одним из наиболее распространенных методов оценки местоположения устройства. В этом методе должны быть известны местоположения, по меньшей мере, двух эталонных Bluetooth-маяков и расстояние между ними. Однако, чтобы точно определить относительное местоположение узла, необходимы три маяка. Метод трилатерации использует значение индикатора уровня принимаемого сигнала (RSSI), чтобы вычислить расстояние между маяками Bluetooth и устройством BLE. Значение RSSI помогает определить близость двух устройств BLE, обеспечивая точность уровня счетчика. Значение RSSI указывает силу сигнала маяка, как видно из приемного устройства BLE. Когда значение RSSI увеличивается, сигнал-маяк усиливается. Эта зависимость помогает указать, когда устройство BLE находится в непосредственной близости от маяка. Поскольку направление сигнала-маяка не может быть определено трилатерацией, расположение устройства BLE может быть в любой точке на окружности. Однако идеальное расположение устройства BLE находится в общей точке пересечения трех кругов. Из-за отсутствия информации, связанной с направлением сигнала-маяка, три окружности могут не всегда иметь общую точку пересечения.
В трилатерации преимущество использования значения RSSI заключается в том, что оно не нуждается в каком-либо дополнительном оборудовании или сопряжено с дополнительными накладными расходами на связь. Напротив, точности основанного на RSSI подхода препятствует точность выбранной модели потерь пути. Кроме того, этот подход недостаточно точен для нескольких вариантов использования. Даже если эталонное значение RSSI эффективно калибруется при первой установке маяка Bluetooth, на вычисленное значение RSSI влияют условия окружающей среды, такие как присутствие людей и уровни влажности. Подход, основанный на RSSI, дает низкую точность, особенно в сценариях внутри помещений, которые заполнены препятствиями, такими как стенки и мебель. Эти препятствия являются источником многолучевого замирания и делают отношение между расстоянием и RSSI неточным.
Основанная на триангуляции оценка местоположения: Триангуляция является методом вычисления положения точки, которая опирается на известное расстояние между двумя или тремя контрольными точками и углами, измеренными с помощью функции нахождения направления Bluetooth между этими контрольными точками и этой точкой. Эти углы могут быть AoA или AoD. Для получения дополнительной информации смотрите Угол прибытия (AoA) и Угол отправления (AoD). В отличие от трилатерации, которая реализует только измерения расстояния, метод триангуляции использует измерения угла. С помощью этого метода можно вычислить положение любой точки в 2-D, учитывая три угла между точкой и другими тремя опорными точками. Однако в 2-D пространстве для оценки местоположения любой точки требуется минимум два угла. Со ссылкой на предыдущий рисунок d 12, d 23 и d 13 обозначают расстояния между Bluetooth-маяками 1-2, 2-3 и 1-3 соответственно. Углы x, y и z являются известными измерениями угла между устройством BLE и Bluetooth-маяками 1, 2 и 3, соответственно. Используя эти известные измерения, метод триангуляции позволяет вам вычислить углы α, β и Следовательно, получают местоположение устройства BLE. Триангуляция является сложным методом, который требует информации о местоположении и пространственном вращении маяков Bluetooth. Однако из-за возможностей AoA и AoD триангуляция дает более точное местоположение устройства BLE по сравнению с методом трилатерации.
Чтобы точно определить местоположение устройства BLE, более совершенные решения должны реализовать несколько маяков Bluetooth и сложных алгоритмов, основанных на методах трилатерации и триангуляции.
Спецификация ядра Bluetooth [2] представила новые возможности, поддерживающие высокоточное определение направления. Спецификация контроллера улучшена так, что специализированное оборудование, которые содержат антенную решетку, могут использоваться для определения направления принимаемого сигнала BLE. HCI модифицируется так, чтобы данные, полученные контроллером, могли быть доступны для более высоких слоев стека, где могут выполняться вычисления направления. Определение направления Bluetooth предлагает два различных метода, каждый из которых использует один и тот же базовый базис. Эти методы определения направления являются - AoA и AoD.
Примечание
Возможности определения направления Bluetooth, AoA и AoD, представлены в спецификации Bluetooth Core 5.1 [2].
Устройство BLE может посылать свою информацию, связанную с направлением, другому одноранговому устройству BLE путем передачи пакетов, разрешенных для определения направления, с помощью одной антенны. Одноранговое устройство BLE, состоящее из RF-переключателя и антенной решетки, переключает антенны и захватывает принятые синфазную (I) и квадратурную (Q) выборки. Устройство BLE использует эти I и Q выборки, чтобы вычислить различие фаз в радиосигнале, принимаемом различными элементами антенной решетки. Следовательно, вычисленное различие фаз используется для оценки AoA. Этот рисунок иллюстрирует концепцию метода AoA.
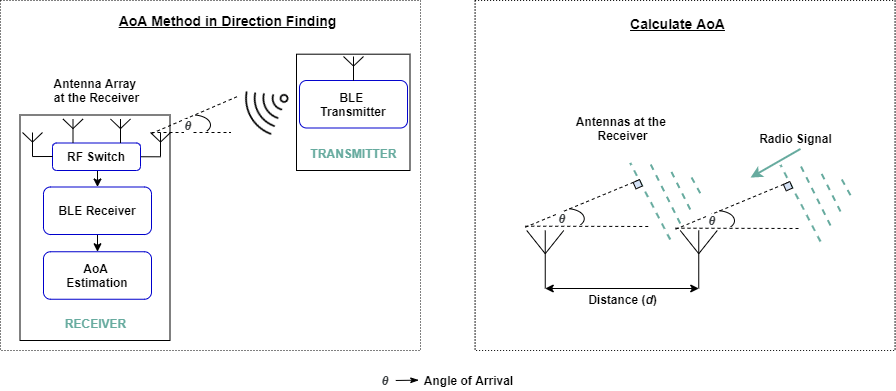
Передатчик использует одну антенну, в то время как приемник устройство использует антенную решетку, обрабатываемую радиочастотным коммутатором. В приемник d обозначает расстояние между двумя антеннами. Различие фаз, ψ, между сигналами, поступающими в две антенны, вычисляется как:
.r- длина волны сигнала, и θ является AoA. Чтобы избежать эффекта сглаживания, максимальное значение d должно быть Переставляя вышеописанное уравнение, AoA вычисляется как:
В отличие от AoA, метод AoD состоит из одной антенны в приемник и нескольких антенн в передатчике. Передатчик BLE, состоящий из RF-переключателя и антенной решетки, может сделать свою AoD обнаруживаемой путем передачи пакетов определения направления и последующей коммутации антенн в антенной решётке во время передачи. Приемник BLE принимает пакеты с помощью одной антенны и захватывает I и Q выборки. Направление сигнала определяется из различных задержек распространения сигнала BLE между множеством антенн антенной решетки и одной приемной антенной. Этот рисунок иллюстрирует концепцию метода AoD.
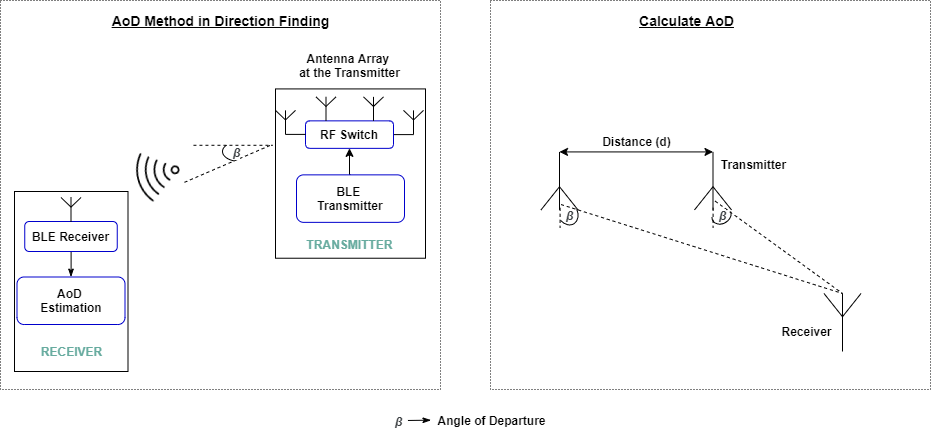
Приемное устройство использует одну антенну, в то время как передающее устройство имеет антенную решетку, обрабатываемую радиочастотным переключателем. В передатчике d обозначает расстояние между двумя антеннами. Различие фаз, ψ, между сигналами, поступающими в две антенны, вычисляется как:
.r- длина волны сигнала, и β - AoD. Путем перестройки вышеописанного уравнения AoD вычисляется как:
Основным применением антенных решеток является направление излучаемого сигнала к желаемому угловому сектору. Количество, геометрический проект, относительные амплитуды и относительные фазы элементов антенной решетки зависят от желаемого углового шаблона. Если антенная решетка спроектирована так, чтобы фокусироваться в определенном направлении, массив может также направляться в другом направлении путем изменения относительных фаз элементов массива. Этот рисунок показывает некоторые обычно используемые проекты антенных решеток.
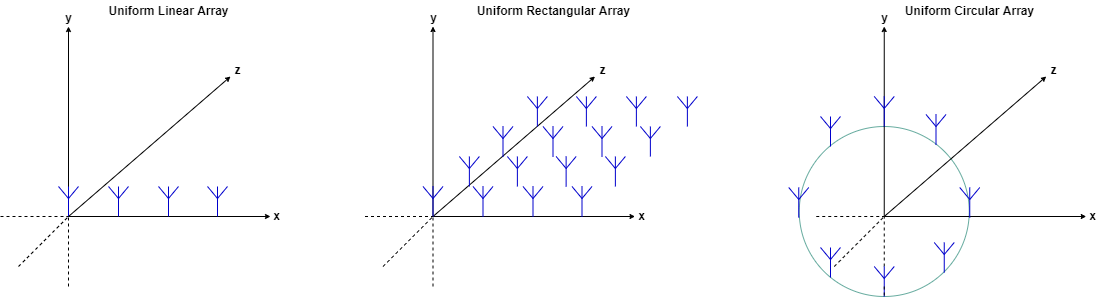
В корпусе равномерного линейного массива (ULA) антенные элементы расположены в одну линию. В корпусе равномерного прямоугольного массива (URA) антенные элементы расположены вдоль прямоугольной решетки. Равномерный круговой массив (UCA) позволяет размещать антенные элементы вдоль окружности. Геометрические проекты ULA просты и позволяют вычислять только один угол из сигнала. Более сложные проекты антенных решеток могут позволить определить два или три угла. Вычисление углов повышения и азимута сигнала относительно базовой плоскости распространено в этих антенных решетках. Этот рисунок показывает концепцию углов повышения и азимута.
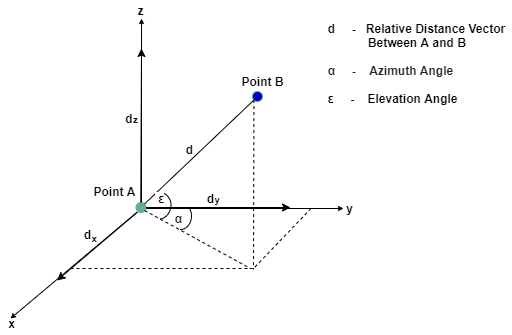
d - относительный вектор расстояния между точками A и B. dx, dy, и dz обозначают компоненты d вдоль x - y - и z - ось, соответственно. Используя эту информацию, угол азимута (α) и угол возвышения (,) между точками A и B вычисляются как:
Сигналы направления Bluetooth являются важной частью метода направления Bluetooth. Сигналы определения направления обеспечивают источник материала постоянного сигнала, к которому может быть применена дискретизация IQ. Модули данных протокола нового канального слоя (LL) (PDU) идентифицируются для определения направления между двумя подключенными устройствами BLE. Кроме того, спецификация Bluetooth Core [2] позволяет использовать существующие рекламные PDU в целях определения направления без подключения. В этих случаях к PDU добавляется дополнительная информация, известная как CTE. Чтобы вычислить AoA и AoD, сигналы направления Bluetooth используют эти поля структуры пакета BLE.
Этот рисунок показывает структуру пакета для незакодированной BLE PHY, работающей на LE 1M и LE 2M. Поле CTE добавляется в конце структуры пакета.

CTE содержит ряд символов, каждый из которых представляет двоичный 1. Количество символов в поле CTE конфигурируется более высокими слоями так, чтобы подходящее количество данных и времени было доступно для IQ-дискретизации.
Примечание
Для получения дополнительной информации о CTE см. том 6, Часть B, Раздел 2.5.1 Спецификации ядра Bluetooth [2].
В данном радиоканале Bluetooth использует две частоты, одна для обозначения цифровых 0, а другая для обозначения цифровых 1. Эти две частоты вычисляются путем сложения или вычитания отклонения частоты в или из центральной частоты канала. Любое изменение частоты также изменяет длину волны. Длина волны является важным фактором в вычислении направления из выборок IQ. Поэтому CTE состоит исключительно из цифровых 1s. Это подразумевает, что весь CTE передается на одной частоте и имеет постоянную длину волны.
Каждый пакет BLE содержит поле CRC, которое используется при выявлении ошибок. Передатчик BLE вычисляет значение CRC из оставшейся части пакета, который будет передан, добавляет CRC к концу пакета и передает пакет. Приемник BLE выполняет то же вычисление и сравнивает вычисленное значение CRC с добавленным значением CRC. Если значения CRC неравны, произошла ошибка связи. Это вызывает изменение одного или нескольких переданных бит. В этом случае пакет игнорируется приемником BLE и может быть повторно передан передатчиком BLE.
Примечание
Значение CTE в пакетах определения направления не включено в расчет CRC.
Если соединение между передатчиком BLE и приемником зашифровано и аутентифицировано, PDU LL включает в себя поле MIC. Значение MIC используется для аутентификации отправителя PDU.
Примечание
Значение CTE в пакетах определения направления не включено в расчет MIC.
Отбеливание относится к процессу скремблирования бит, чтобы избежать длительных последовательностей 1с и 0с в переданном потоке битов. Длительные последовательности 1с и 0с могут заставить приемник потерять частотную блокировку и действовать так, как будто центральная частота переместилась вверх или вниз. BLE использует отбеливание, чтобы скремблировать поля PDU и CRC всех пакетов LL.
Примечание
Значение CTE в пакетах определения направления не подлежит процессу отбеливания.
Спецификация ядра Bluetooth [2] позволяет использовать AoA и AoD в коммуникациях без подключения или без подключения. Однако в типичных случаях использования AoD используется без соединения, а AoA используется с ориентированной на соединение связью. В этой таблице показаны четыре возможных сочетаний использования AoA и AoD с бесконтактной и ориентированной на соединение связью.
| Тип соединения | AoA | AoD |
|---|---|---|
| Без установления соединения | Поддержка контроллера BLE опциональна. | Поддержка контроллера BLE опциональна. Использование AoD без соединения является типичным. |
| Ориентированное на соединение | Поддержка контроллера BLE опциональна. Использование AoA с ориентированной на соединение связью типично. | Поддержка контроллера BLE опциональна. |
Безконнекционное нахождение направления реализует периодическую рекламу Bluetooth. CTE добавляется к стандартным AUX_SYNC_IND PDU. Ориентированное на соединение определение направления передает CTE с помощью новых пакетов LL_CTE_RSP, которые передаются по соединению в качестве подтверждения LL_CTE_REQ PDU. В обоих случаях перед началом IQ-дискретизации и генерацией пакетов, несущих CTE, должны быть завершены различные шаги настройки и строения.
С помощью возможности нахождения по направлению Bluetooth можно разработать системы близости и позиционирования, работающие с точностью до субметра, для таких случаев использования, как внутреннее позиционирование, поиск пути, отслеживание активов и обнаружение направлений. Возможность определения направления Bluetooth повышает проверенные технические методы для направления сигнала. Эта возможность также стандартизирует интерфейсы, взаимодействия и заметные внутренние операции стека BLE. Точное определение направления теперь взаимодействует между различными производителями и может быть широко распространено, чтобы создать новую генерацию передовых услуг Bluetooth по поиску местоположения и направления.
[1] Веб-сайт Bluetooth Technology. Bluetooth Technology Website | Официальный сайт Bluetooth Technology. Доступ к 22 ноября 2019 года. https://www.bluetooth.com/.
[2] Группа специальных интересов Bluetooth (SIG). Bluetooth Core Спецификации. Версия 5.1. https://www.bluetooth.com/.
[3] Suryavanshi, Nitesh B., K. Viswavardhan Reddy, and Vishnu R. Chandrika. «Возможность определения направления в стандарте Bluetooth 5.1». В Ubiquitous Communications and Network Computing под редакцией Навина Кумара и Р. Венкатеши Прасада, 53-65. Лекции Института компьютерных наук, социальной информатики и телекоммуникационной инженерии. Cham: Springer International Publishing, 2019.
