Существует два распространенных типа операций, которые влияют на систему координат и частоты дискретизации сигнала: прямое преобразование скорости и рефуферизация системы координат. Прямое преобразование скорости, такое как усиление дискретизации и понижение дискретизации, может быть реализовано путем изменения либо частоты систем координат, либо формата кадра сигнала. Система координат рефуферизации, которая используется для изменения формата кадра сигнала в порядке улучшения пропускной способности симуляции, обычно изменяет или частоту дискретизации, или системы координат скорость сигнала.
В следующей таблице перечислены блоки преобразования основной ставки в программном обеспечении DSP System Toolbox™. Блоки, отмеченные звездочкой (*), предлагают опцию изменения скорости либо путем корректировки формата кадра, либо частоты систем координат.
| Блок | Библиотека |
|---|---|
Downsample * | Сигнальные операции |
Банк фильтров диадического анализа | Фильтрация/многомерные фильтры |
Банк фильтров диадического синтеза | Фильтрация/многомерные фильтры |
Десятикратное уменьшение конечной импульсной характеристики * | Фильтрация/многомерные фильтры |
Конечная импульсная характеристика интерполяция * | Фильтрация/многомерные фильтры |
Конечная импульсная характеристика преобразования скорости | Фильтрация/многомерные фильтры |
Повторите * | Сигнальные операции |
Upsample * | Сигнальные операции |
Блоки преобразования скорости принимают входной сигнал с одной частотой дискретизации и распространяют тот же сигнал с новой частотой дискретизации. Несколько из этих блоков содержат параметр Rate options, предлагающий две опции для многократной и односкоростной обработки:
Enforce single-rate processing: Когда вы выбираете эту опцию, блок поддерживает входную частоту выборки.
Allow multirate processing: Когда вы выбираете эту опцию, блок уменьшает сигнал таким образом, что выходная частота выборки в K раз медленнее, чем входная частота выборки.
Примечание
Когда Simulink® модель содержит сигналы с различными системами координат, модель называется multirate. Вы можете найти обсуждение многоскоростных моделей в Избыточной Алгоритмической Задержке (Задержка Задачи). Также смотрите Основанное на времени Планирование и Генерация кода (Simulink Coder).
Один способ изменить частоту дискретизации сигнала, 1 / Tso, состоит в том, чтобы изменить частоту кадров выхода (Tfo ≠ <reservedrangesplaceholder5>), сохраняя формат кадра постоянным (Mo = Mi). Обратите внимание, что скорость дискретизации сигнала задается как 1/ Tso = Mo/ Tfo:
В MATLAB® в командной строке введите ex_downsample_tut1.
Откроется модель T1 Downsample.
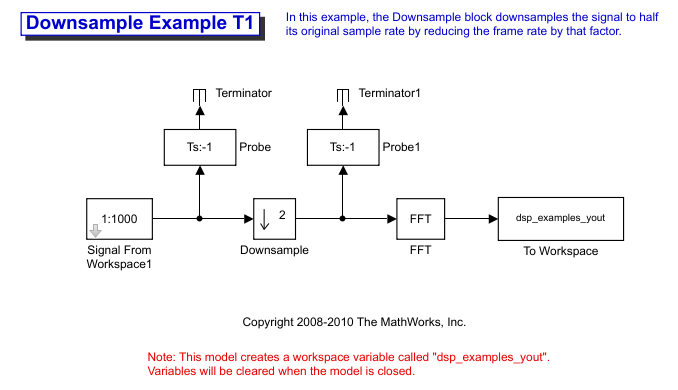
На вкладке Debug выберите Information Overlays > Signal Dimensions.
Когда вы запускаете модель, размерности сигналов появляются рядом с линиями, соединяющими блоки.
Дважды кликните блок Signal From Workspace. Откроется диалоговое окно Source Block Parameters: Signal From Workspace.
Установите параметры блоков следующим образом:
Sample time = 0.125
Samples per frame = 8
Основываясь на этих параметрах, блок Signal From Workspace выводит сигнал с периодом дискретизации 0,125 секунды и форматом кадра 8.
Сохраните эти параметры и закройте диалоговое окно нажатием кнопки OK.
Дважды кликните блок Downsample. Откроется диалоговое окно Function Block Parameters: Downsample.
Установите параметр Rate options равным Allow multirate processing, а затем нажмите OK.
Блок Downsample сконфигурирован, чтобы уменьшить частоту сигнала путем изменения частоты систем координат, а не формата кадра.
Запустите модель.
После симуляции модель должна выглядеть аналогично следующему рисунку.
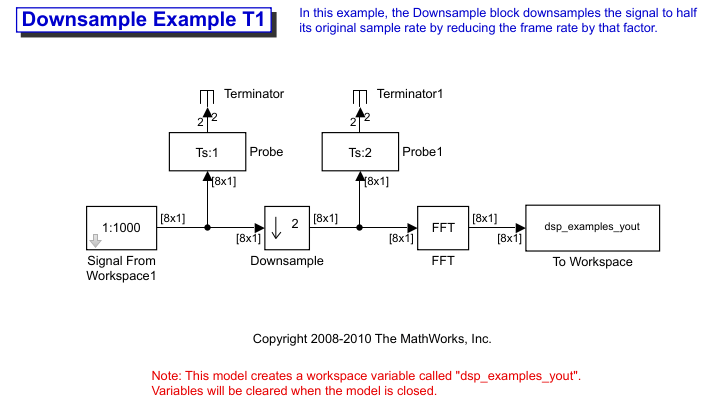
Поскольку , период входного кадра, является второе. Это значение отображается первым блоком Probe. Поэтому скорость входного кадра, , также составляет 1 систему координат в секунду.
Второй блок Probe в модели проверяет, что выход из блока Downsample имеет период системы координат, , из 2 секунд, в два раза больше, чем период системы координат входа. Однако, поскольку частота систем координат выхода, , составляет 0,5 системы координат в секунду, блок Downsample фактически уменьшил дискретизацию исходного сигнала до половины его исходной скорости. В результате выходной период дискретизации, , удваивается до 0,25 секунды без какого-либо изменения формата кадра. Размерности сигнала в модели подтверждают, что формат кадра не изменился.
Один из способов изменить частоту дискретизации сигнала - это изменить размер кадра (то есть Mo ≠ Mi), но сохранить постоянную частоту кадров (Tfo = Tfi). Обратите внимание, что скорость дискретизации сигнала задается как 1/ Tso = Mo/ Tfo:
В командной строке MATLAB введите ex_downsample_tut2.
Откроется модель T2 Downsample.
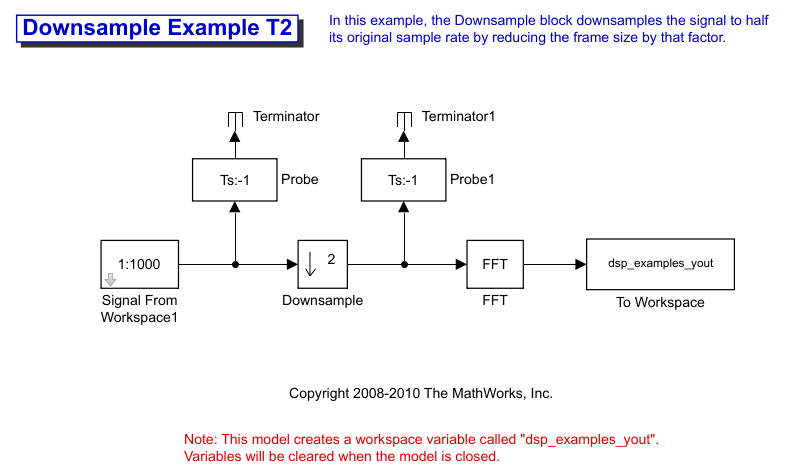
На вкладке Debug выберите Information Overlays > Signal Dimensions.
Когда вы запускаете модель, размерности сигналов появляются рядом с линиями, соединяющими блоки.
Дважды кликните блок Signal From Workspace. Откроется диалоговое окно Source Block Parameters: Signal From Workspace.
Установите параметры блоков следующим образом:
Sample time = 0.125
Samples per frame = 8
Основываясь на этих параметрах, блок Signal From Workspace выводит сигнал с периодом дискретизации 0,125 секунды и форматом кадра 8.
Сохраните эти параметры и закройте диалоговое окно нажатием кнопки OK.
Дважды кликните блок Downsample. Откроется диалоговое окно Function Block Parameters: Downsample.
Установите параметр Rate options равным Enforce single-rate processing, а затем нажмите OK.
Блок Downsample сконфигурирован, чтобы уменьшить частоту сигнала путем изменения формата кадра, а не частоты систем координат.
Запустите модель.
После симуляции модель должна выглядеть аналогично следующему рисунку.
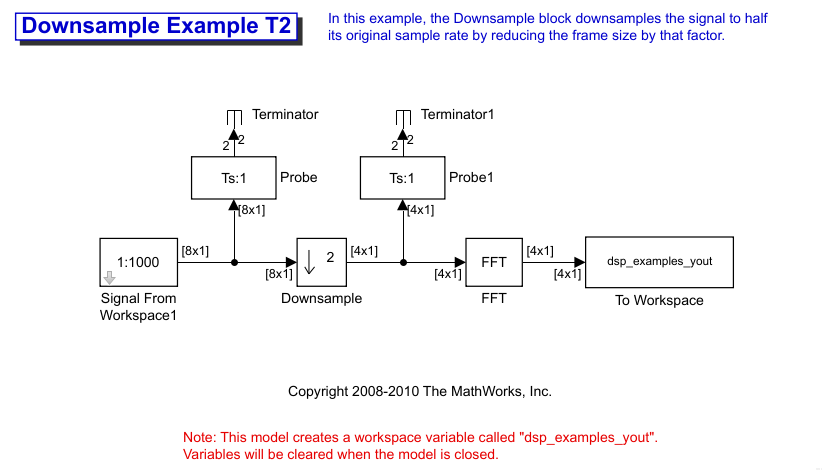
Поскольку , период входного кадра, является второе. Это значение отображается первым блоком Probe. Поэтому скорость входного кадра, , также составляет 1 систему координат в секунду.
Блок Downsample уменьшил дискретизацию входного сигнала до половины его исходного формата кадра. Размерности сигнала на выходе блока Downsample подтверждают, что уменьшенный выход имеет формат кадра 4, половину формата кадра входа. В результате, период дискретизации выхода, составляет 0,25 секунды. Этот процесс произошел без каких-либо изменений частоты систем координат ().
Существует два распространенных типа операций, которые влияют на систему координат и частоты дискретизации сигнала: прямое преобразование скорости и рефуферизация системы координат. Прямое преобразование скорости, такое как усиление дискретизации и понижение дискретизации, может быть реализовано путем изменения либо частоты систем координат, либо формата кадра сигнала. Система координат рефуферизации, которая используется, изменяет формат кадра сигнала в порядок улучшения пропускной способности симуляции, обычно изменяет или частоту дискретизации, или системы координат скорость сигнала.
Иногда вам может потребоваться дать отпор сигналу нового формата кадра в какой-то момент модели. Для примера ваше оборудование для сбора данных может внутренне буферизировать дискретизированный сигнал в формат кадра, которая не оптимальна для алгоритма обработки сигналов в модели. В этом случае вы хотели бы отбросить сигнал до формата кадра, более подходящего для предполагаемых операций, не вводя никаких изменений в данные или частоту дискретизации.
В следующей таблице перечислены основные блоки буферизации DSP System Toolbox.
| Блок | Библиотека |
|---|---|
Управление сигналами/буферы | |
Управление сигналами/буферы | |
Управление сигналами/буферы | |
Управление сигналами/индексация |
Операции буферизации обеспечивают другой механизм изменения скорости в моделях обработки сигналов. Цель многих операций буферизации состоит в том, чтобы настроить формат кадра сигнала M, не изменяя Ts скорости дискретизации сигнала. Это обычно приводит к изменению частоты систем координат сигнала, Tf, согласно следующему уравнению:
Однако приведенное выше уравнение верно только, если никакие выборки не добавляются или не удаляются из исходного сигнала. Поэтому уравнение выше не применяется к операциям буферизации, которые генерируют перекрываемые системы координат, которые только частично распаковывают системы координат или которые изменяют последовательность данных путем добавления или удаления выборок.
В библиотеке Buffers есть два блока, которые могут использоваться, чтобы изменить формат кадра сигнала, не изменяя сам сигнал:
Блок Buffer сохраняет данные сигнала и период дискретизации только, когда его параметр Buffer overlap установлен в 0. Период выходной системы координат , Tfo, является
где Tfi - период входного кадра, Mi - размер входного кадра, а Mo - выход формата кадра, заданная параметром Output buffer size (per channel).
Блок Unbuffer распаковывает сигнал системы координат и всегда сохраняет данные сигнала и период дискретизации
где Tfi и Mi являются периодом и размером, соответственно, сигнала системы координат.
И блоки Buffer, и Unbuffer сохраняют период дискретизации последовательности в преобразовании (Tso = Tsi).
Некоторые формы буферизации изменяют данные сигнала или период расчета в сложение с регулировкой формата кадра. Этот тип буферизации желателен, когда вы хотите создать скользящие окна путем перекрытия последовательных систем координат сигнала или выбора подмножества выборок из каждого входного кадра для обработки.
Блоки, которые изменяют сигнал при корректировке его формата кадра, перечислены ниже. В этом списке Tsi является периодом дискретизации входной последовательности, и Tfi и Tfo являются периодами входа и выхода системы координат, соответственно:
Блок Buffer добавляет повторяющиеся выборки в последовательность, когда параметр Buffer overlap L установлен на ненулевое значение. Период выхода системы координат связан с входом, периодом дискретизации
где Mo - выход формата кадра, заданная параметром Output buffer size (per channel). В результате новый выходной период дискретизации
Блок Линия добавляет повторяющиеся выборки в последовательность, когда параметр Delay line size, Mo, больше 1. Выходные и входные периоды кадра одинаковы, Tfo = Tfi = Tsi, и новый выходной период выборки
Блок Variable Selector может удалять, добавлять и/или переставлять выборки во входном кадре, когда Select установлено на Rows. Выходные и входные периоды кадра одинаковы, Tfo = Tfi, и новый выходной период выборки
где Mo - длина выхода блока, определяемая вектором Elements.
Во всех этих случаях периода дискретизации последовательности выхода не равны периоды дискретизации последовательности входа.
В следующем примере сигнал с периодом дискретизации 0,125 секунды отбивается от формата кадра 8 до формата кадра 16. Этот процесс отпора удваивает период системы координат с 1 до 2 секунд, но не изменяет период дискретизации сигнала (Tso = Tsi = 0,125). Процесс также не добавляет или удаляет выборки из исходного сигнала:
В командной строке MATLAB введите ex_buffer_tut1.
Откроется модель T1 Пример.
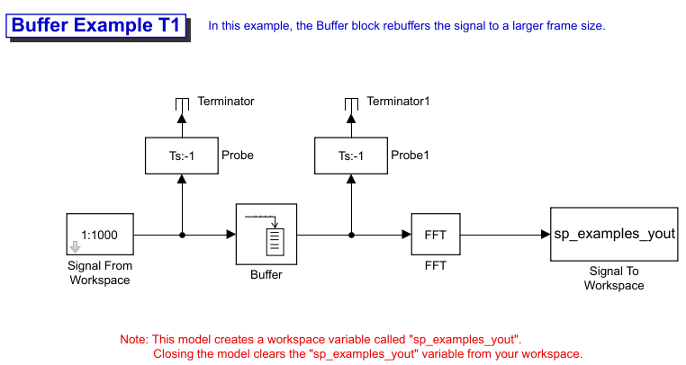
Дважды кликните блок Signal From Workspace. Откроется диалоговое окно Source Block Parameters: Signal From Workspace.
Установите параметры следующим образом:
Signal = 1:1000
Sample time = 0.125
Samples per frame = 8
Form output after final data value = Setting to zero
Основываясь на этих параметрах, блок Signal from Workspace выводит сигнал с периодом дискретизации 0,125 секунды. Каждая выходная система координат содержит восемь выборок.
Сохраните эти параметры и закройте диалоговое окно нажатием кнопки OK.
Дважды кликните блок Buffer. Откроется диалоговое окно Function Block Parameters: Buffer.
Установите параметры следующим образом и нажмите OK:
Output buffer size (per channel) = 16
Buffer overlap = 0
Initial conditions = 0
На основе этих параметров блок Buffer отбивает сигнал от формата кадра 8 до формата кадра 16.
Запустите модель.
Следующий рисунок показывает модель после симуляции.
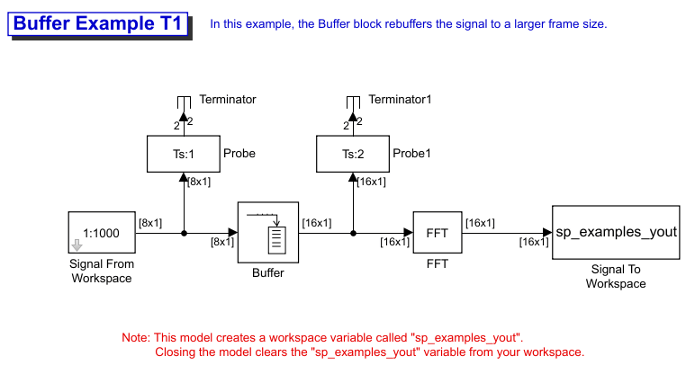
Обратите внимание, что вход в блок Buffer имеет формат кадра 8, и выход блока имеет формат кадра 16. Как показано блоками Probe, процесс ребуферизации удваивает период системы координат с 1 до 2 секунд.
Некоторые формы буферизации изменяют данные сигнала или период расчета в сложение с регулировкой формата кадра. В следующем примере сигнал с периодом дискретизации 0,125 секунды отбивается от формата кадра 8 до формата кадра 16 с перекрытием буфера 4:
В командной строке MATLAB введите ex_buffer_tut2.
Откроется модель T2 Пример.
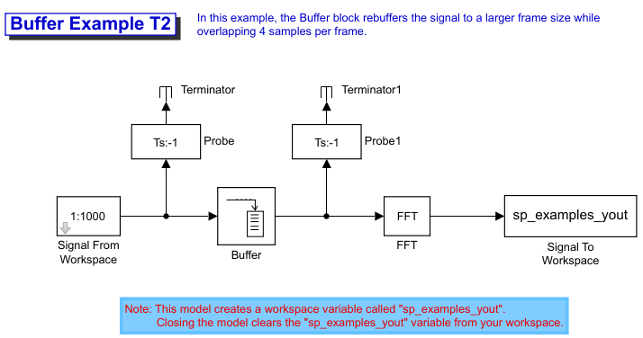
Дважды кликните блок Signal From Workspace. Откроется диалоговое окно Source Block Parameters: Signal From Workspace.
Установите параметры следующим образом:
Signal = 1:1000
Sample time = 0.125
Samples per frame = 8
Form output after final data value = Setting to zero
Основываясь на этих параметрах, блок Signal from Workspace выводит сигнал с периодом дискретизации 0,125 секунды. Каждая выходная система координат содержит восемь выборок.
Сохраните эти параметры и закройте диалоговое окно нажатием кнопки OK.
Дважды кликните блок Buffer. Откроется диалоговое окно Function Block Parameters: Buffer.
Установите параметры следующим образом и нажмите OK:
Output buffer size (per channel) = 16
Buffer overlap = 4
Initial conditions = 0
На основе этих параметров блок Buffer отбивает сигнал от формата кадра 8 до формата кадра 16. Кроме того, после начального выхода первые четыре выборки каждой выходной системы координат состоят из последних четырех выборок из предыдущей выходной системы координат.
Запустите модель.
Следующий рисунок показывает модель после остановки симуляции.
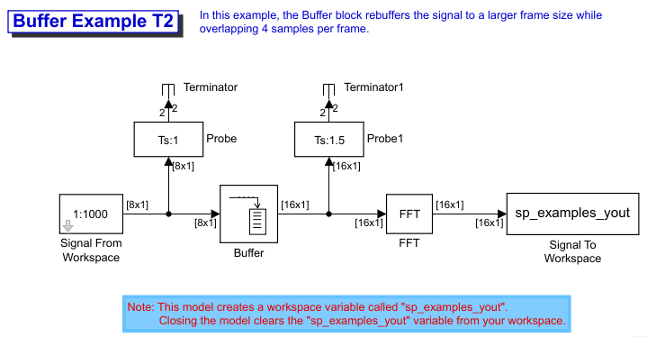
Обратите внимание, что вход в блок Buffer имеет формат кадра 8, и выход блока имеет формат кадра 16. Отношение для периода выходной системы координат для блока Buffer:
Tfo (16-4) * 0,125, или 1,5 секунды, как подтверждено блоком второго Probe (Simulink). Период дискретизации сигнала на выходе блока Buffer больше не составляет 0,125 секунды. Это сейчас второе. Таким образом, как данные сигнала, так и период дискретизации сигнала были изменены операцией буферизации.
