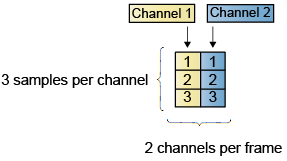
При обработке на основе фреймов блоки обрабатывают данные по одной системе координат за раз. Каждая система координат данных содержит последовательные выборки из независимого канала. Каждый канал представлен столбцом входного сигнала. Для примера с точки зрения обработки на основе фрейма следующая матрица 3 на 2 имеет два канала, каждый из которых содержит три выборки.
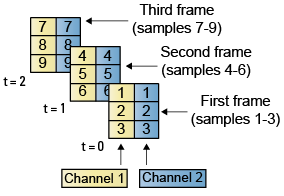
Когда вы конфигурируете блок для выполнения кадровой обработки, блок интерпретирует вектор M-на-1 как одноканальный сигнал, содержащий M выборок на систему координат. Точно так же блок интерпретирует M -by - N матрицу как многоканальный сигнал с N независимыми каналами и M выборками на канал. Для примера при кадровой обработке блоки интерпретируют следующую последовательность матриц 3 на 2 как двухканальный сигнал с форматом кадра 3.
Использование кадровой обработки выгодно для многих приложений обработки сигналов, потому что вы можете обрабатывать несколько выборок сразу. Буферизуя свои данные в системы координат и обрабатывая мультисамповые системы координат данных, вы часто можете улучшить вычислительное время алгоритмов обработки сигналов. Для выполнения обработки на основе фрейма необходимо иметь лицензию DSP System Toolbox™.
Для получения дополнительной информации о последних изменениях в обработке на основе фреймов смотрите раздел «Изменения обработки на основе фреймовв Информациях о релизах DSP System Toolbox.
Блок Signal From Workspace создает многоканальный сигнал для кадровой обработки, когда параметр Signal является матрицей, и параметр Samples per frame, M, больше 1. Начиная с первых M строк матрицы, блок релизов M строки матрицы (то есть по одной системе координат от каждого канала) к выходу порту каждые M * Ts секунд. Поэтому, если параметр Signal задает матрицу W -by N рабочей области, блок Signal From Workspace выводит серию M -by - N матриц, представляющих N каналы. Матрица рабочей области должна быть ориентирована так, чтобы ее столбцы представляли каналы сигнала.
Рисунок ниже является графическим рисунком этого процесса для матрицы рабочей области 6 на 4, Aи формат кадра 2.
Примечание
Несмотря на то, что независимые каналы обычно представлены в виде столбцов, одноканальный сигнал может быть представлен в рабочей области как векторе-столбце или векторе-строке. Выходы блока Signal From Workspace являются вектором-столбцом в обоих случаях.
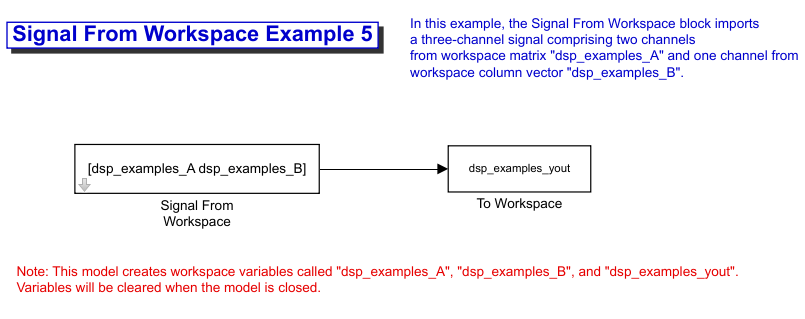
В следующем примере вы используете блок Signal From Workspace, чтобы создать трехканальную систему координат и импортировать его в модель:
Откройте модель Signal From Workspace Example 5 путем набора
в MATLAB® командная строка.
dsp_examples_A = [1:100;-1:-1:-100]'; % 100-by-2 matrix dsp_examples_B = 5*ones(100,1); % 100-by-1 column vector
Переменная с именем dsp_examples_<reservedrangesplaceholder0 > представляет двухканальный сигнал со 100 выборками и переменную с именем dsp_examples_<reservedrangesplaceholder0 > представляет одноканальный сигнал со 100 выборками.
Кроме того, в рабочем пространстве MATLAB заданы следующие переменные:
Дважды кликните блок Signal From Workspace. Установите параметры блоков следующим образом и нажмите OK:
Signal параметр в [dsp_examples_A dsp_examples_B]
Sample time параметр в 1
Samples per frame параметр в 4
Form output after final data value параметр в Setting to zero
Основываясь на этих параметрах, блок Signal From Workspace выводит сигнал с форматом кадра 4 и периодом дискретизации 1 секунду. Период системы координат сигнала составляет 4 секунды. Параметр Signal использует стандартный синтаксис MATLAB для горизонтальной конкатенации матриц, чтобы добавить вектора-столбца dsp_examples_B справа от матрицы dsp_examples_A. После того, как блок выводит сигнал, все последующие выходы имеют значение нуля.
Запустите модель.
Рисунок ниже является графическим представлением того, как ваша трехканальная система координат импортируется в вашу модель.
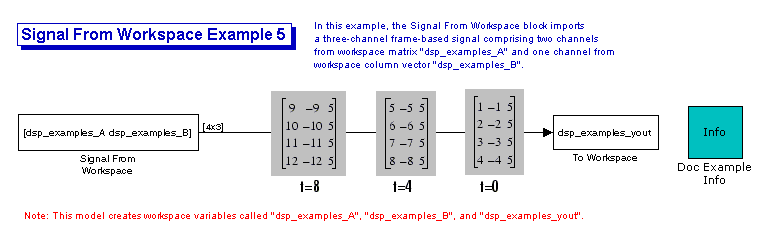
Теперь вы успешно импортировали сигнал трехканальной системы координат в вашу модель с помощью блока Signal From Workspace.
Блоки To Workspace (Simulink) и Triggered To Workspace являются основными блоками для экспорта сигналов всех размерностей из Simulink® модель в рабочее пространство MATLAB.
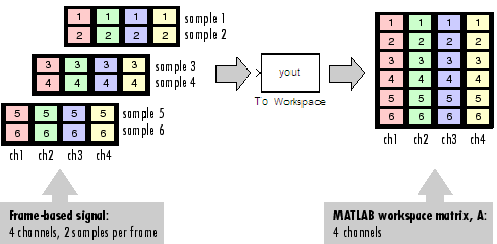
Сигнал с N каналами и форматом кадра M представлен последовательностью M -by - N матриц. Когда этот сигнал вводится в блок To Workspace, блок создает P массив -by- N в рабочем пространстве MATLAB, содержащий P последних выборок из каждого канала. Количество строк, P, задается параметром Limit data points to last. Самые новые выборки добавляются в нижней части матрицы.
Следующий рисунок является графической иллюстрацией этого процесса для трёх последовательных систем координат сигнала с форматом кадра 2, который экспортируется в матрицу A в рабочем пространстве MATLAB.
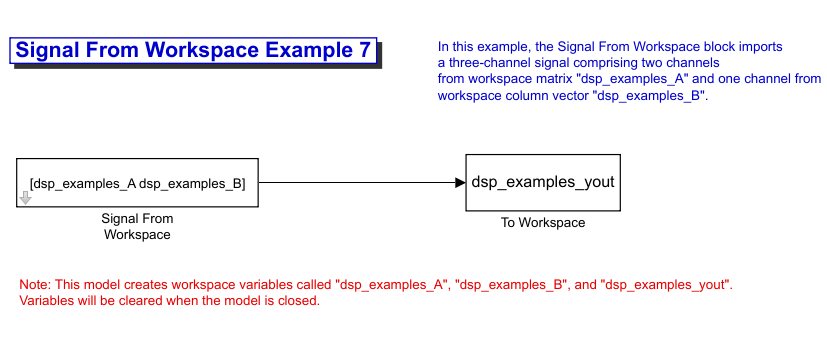
В следующем примере вы используете блок To Workspace для экспорта трехканального сигнала с четырьмя выборками на систему координат в рабочее пространство MATLAB.
Откройте модель Signal From Workspace Example 7 путем ввода ex_exportfbsigs в командной строке MATLAB.
Кроме того, в рабочем пространстве MATLAB заданы следующие переменные:
Переменная с именем dsp_examples_<reservedrangesplaceholder0 > представляет двухканальный сигнал со 100 выборками и переменную с именем dsp_examples_<reservedrangesplaceholder0 > представляет одноканальный сигнал со 100 выборками.
dsp_examples_A = [1:100;-1:-1:-100]'; % 100-by-2 matrix dsp_examples_B = 5*ones(100,1); % 100-by-1 column vector
Дважды кликните блок Signal From Workspace. Установите параметры блоков следующим образом и нажмите OK:
Signal = [dsp_examples_A dsp_examples_B]
Sample time = 1
Samples per frame = 4
<reservedrangesplaceholder1> <reservedrangesplaceholder0>
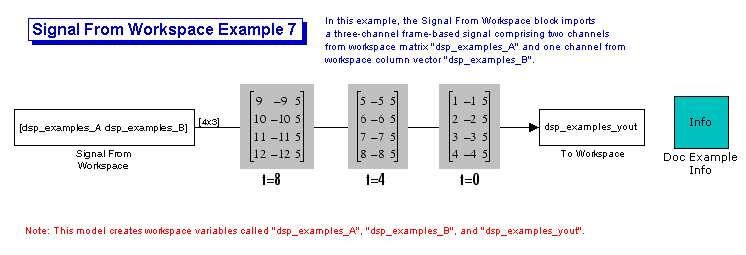
Основываясь на этих параметрах, блок Signal From Workspace выводит сигнал с форматом кадра 4 и периодом дискретизации 1 секунду. Период системы координат сигнала составляет 4 секунды. Параметр Signal использует стандартный синтаксис MATLAB для горизонтальной конкатенации матриц, чтобы добавить вектора-столбца dsp_examples_B справа от матрицы dsp_examples_A. После того, как блок выводит сигнал, все последующие выходы имеют значение нуля.
Дважды кликните блок To Workspace. Установите параметры блоков следующим образом и нажмите OK:
Variable name = dsp_examples_yout
Limit data points to last = inf
Decimation = 1
Frames = Concatenate frames (2-D array)
На основе этих параметров блок To Workspace экспортирует свой входной сигнал в переменную, называемую dsp_examples_yout в рабочем пространстве MATLAB. Переменная рабочей области может вырасти бесконечно большой в порядок, чтобы захватить все входные данные. Сигнал не децимируется перед экспортом в рабочее пространство MATLAB, и каждый входной кадр вертикально соединяется с предыдущей системой координат, чтобы получить выход 2-D массива.
Запустите модель.
Следующий рисунок является графическим представлением поведения модели во время симуляции.
В командной строке MATLAB введите dsp_examples_yout.
Выходные выходы показаны ниже:
dsp_examples_yout =
1 -1 5
2 -2 5
3 -3 5
4 -4 5
5 -5 5
6 -6 5
7 -7 5
8 -8 5
9 -9 5
10 -10 5
11 -11 5
12 -12 5
Системы координат сигнала объединены, чтобы сформировать двумерный массив.
Теперь вы успешно выводите сигнал системы координат в рабочее пространство MATLAB с помощью блока To Workspace.
