Ориентация от показаний акселерометра, гироскопа и магнитометра
Navigation Toolbox Toolbox/Мультисенсорное позиционирование/Навигационные фильтры
Sensor Fusion and Tracking Toolbox/Мультисенсорные позиционные/навигационные фильтры
The AHRS Simulink® блок использует акселерометр, магнитометр и данные гироскопического датчика для оценки ориентации устройства.
Примечание: Следующий алгоритм применяется только к опорной системе координат NED.
Блок AHRS использует девять-осевую структуру фильтра Калмана, описанную в [1]. Алгоритм пытается отследить ошибки в ориентации, смещении гироскопа, линейном ускорении и магнитном нарушении порядка, чтобы вывести конечную ориентацию и скорость вращения. Вместо непосредственного отслеживания ориентации косвенный фильтр Калмана моделирует процесс ошибки, x, с рекурсивным обновлением:
где x k является вектором 12 на 1, состоящим из:
θk -- вектор ошибки ориентации 3 на 1, в степенях, в момент времени k
bk -- гироскоп 3 на 1 нуле вектор смещения угловой скорости, в град/с, в момент времени k
ak -- вектор ошибки ускорения 3 на 1, измеренный в системе координат датчика, в g, в момент времени k
dk -- 3 на 1 вектор ошибки магнитного нарушения порядка, измеренный в системе координат датчика, в мкТ, в момент времени k
и где w k является аддитивным вектором шума 12 на 1, и F k является моделью перехода состояния.
Поскольку x k задан как процесс ошибки, априорная оценка всегда равна нулю, и, следовательно, модель перехода состояния, F k, равна нулю. Это понимание приводит к следующему уменьшению стандартных уравнений Калмана:
Стандартные уравнения Калмана:
Уравнения Калмана, используемые в этом алгоритме:
где:
xk− - прогнозируемая (априори) оценка состояния; процесс ошибки
Pk− - предсказанная (априорная) оценка ковариации
yk -- инновации
Sk -- инновационная ковариация
Kk -- коэффициент усиления Калмана
xk+ - обновленная (апостериорная) оценка состояния
Pk+ - обновленная (a posteriori) оценка ковариации
k представляет итерацию, надстрочный индекс + представляет апостериорную оценку и надстрочный индекс − представляет априорную оценку.
Графические и последующие шаги описывают итерацию на основе одного кадра через алгоритм.
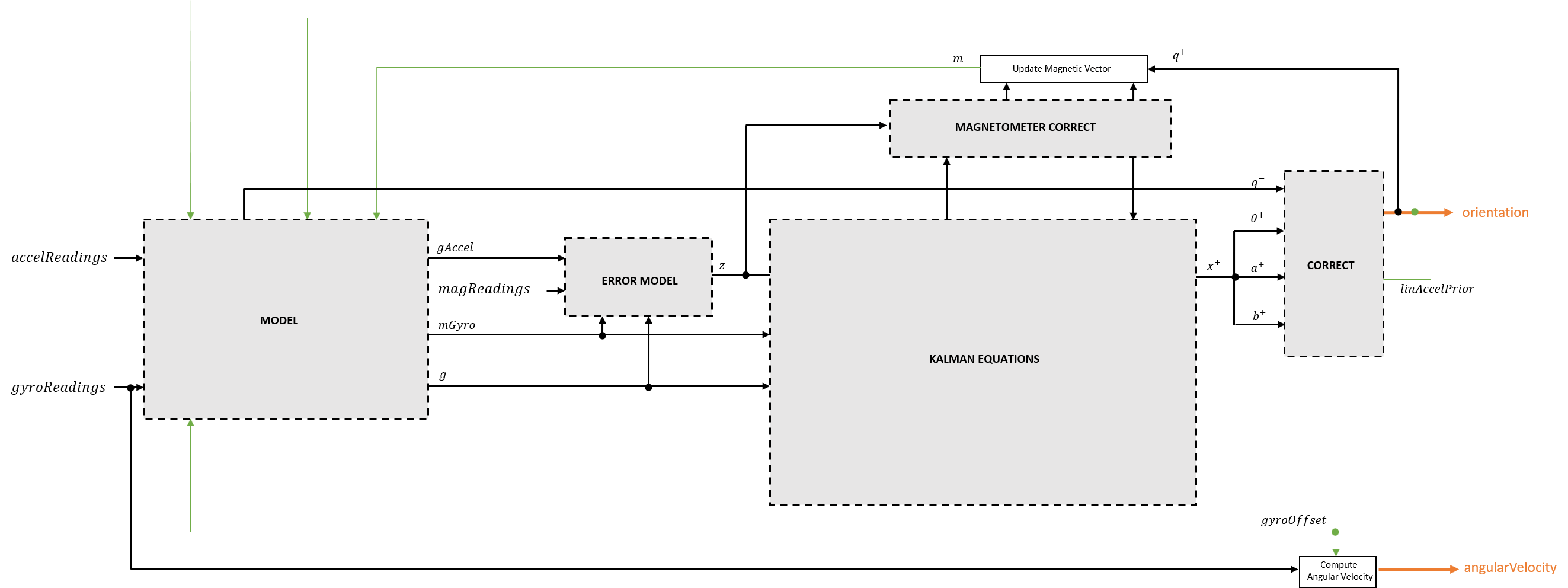
Перед первой итерацией accelReadings, gyroReadings, и magReadings входы шунтируются в DecimationFactor-by-3 системы координат. Для каждого фрагмента алгоритм использует самые актуальные показания акселерометра и магнитометра, соответствующие фрагменту показаний гироскопа.
Пройдите по алгоритму для объяснения каждого этапа подробного обзора.
Алгоритм моделирует ускорение и угловое изменение как линейные процессы.
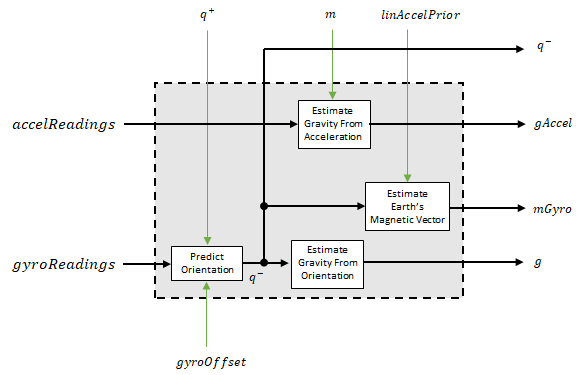
Ориентация для текущей системы координат предсказывается путем первой оценки углового изменения по сравнению с предыдущей системой координат:
где N - коэффициент десятикратного уменьшения, заданный коэффициентом десятикратного уменьшения, и fs является частотой дискретизации.
Угловое изменение преобразуется в кватернионы с помощью rotvec
quaternion синтаксис конструкции:
Предыдущая оценка ориентации обновляется путем поворота ее на И Q:
Во время первой итерации оценка ориентации, q−, инициализируется ecompass.
Вектор гравитации интерпретируется как третий столбец кватерниона, q−, в матричном виде вращения:
Вторую оценку вектора гравитации производят путем вычитания из показаний акселерометра истекшей оценки линейного ускорения предыдущей итерации:
Магнитный вектор Земли оценивается вращением оценки магнитного вектора из предыдущей итерации априорной оценкой ориентации в матричной форме вращения:
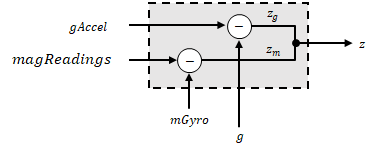
Модель ошибки сочетает в себе два различия:
Различие между оценкой силы тяжести из показаний акселерометра и оценкой силы тяжести из показаний гироскопа:
Различие между оценкой магнитного вектора из показаний гироскопа и оценкой магнитного вектора из магнитометра:
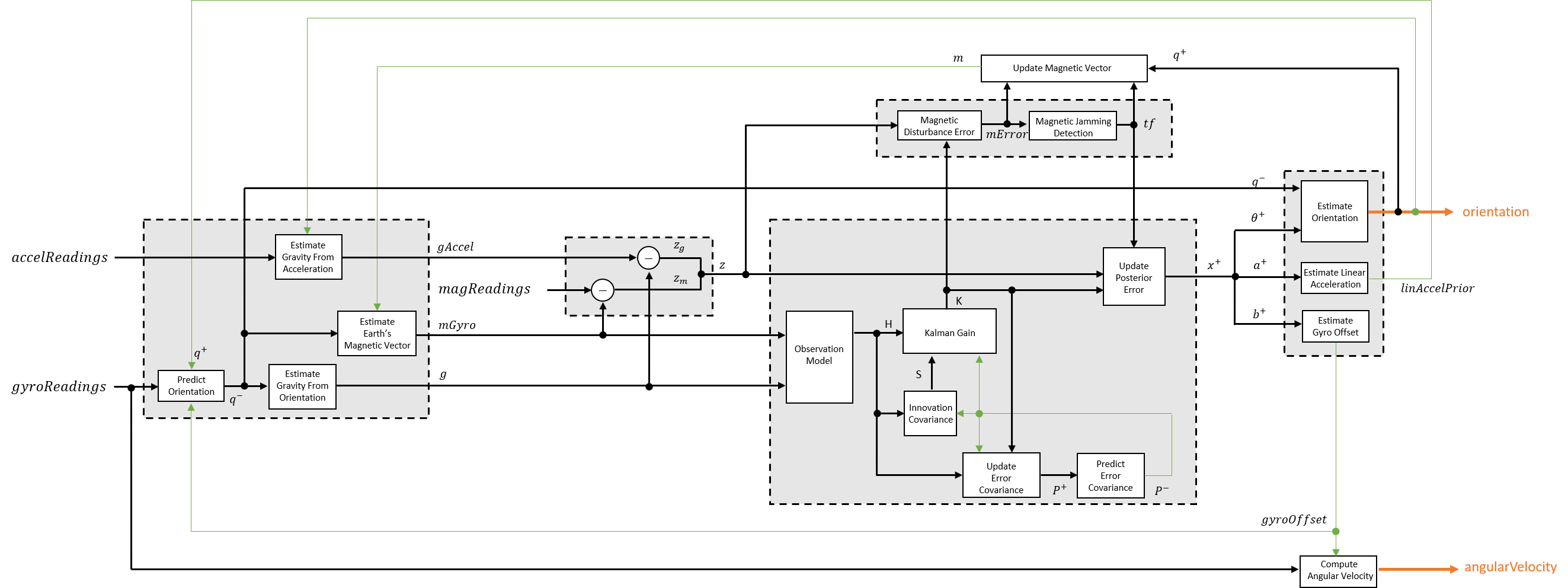
Правильный магнитометр оценивает ошибку в оценке магнитного вектора и обнаруживает магнитные помехи.
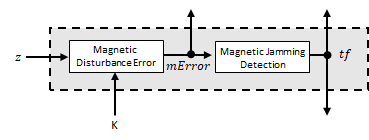
Ошибка магнитного нарушения порядка вычисляется матричным умножением усиления Калмана, сопоставленного с магнитным вектором с сигналом ошибки:
Коэффициент усиления Калмана, K, является коэффициентом усиления Калмана, вычисленным в текущей итерации.
Магнитное заедание определяется путем проверки, что степень обнаруженного магнитного нарушения порядка меньше или равна четырём степеням ожидаемого напряжения магнитного поля:
ExpectedMagneticFieldStrength является свойством ahrsfilter.
Уравнения Калмана используют оценку тяжести, полученную из показаний гироскопа, g, оценку магнитного вектора, полученную из показаний гироскопа, mGyro и наблюдения процесса ошибки, z, чтобы обновить усиление Калмана и промежуточные ковариационные матрицы. Коэффициент усиления Калмана применяется к сигналу ошибки, z, для вывода апостериорной оценки ошибки x+.
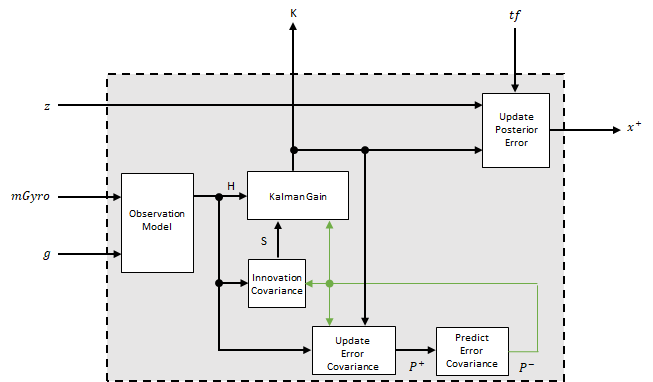
Модель наблюдения преобразует наблюдаемые состояния 1 на 3, g и mGyro, в истинное состояние 6 на 12, H.
Модель наблюдения построена как:
где g x, g y и g z являются x -, y - и z - элементами вектора тяжести, оцененными из априорной ориентации, соответственно. m x, m y и m z являются x -, y - и z - элементами магнитного вектора, оцененными из априорной ориентации, соответственно. κ является константой, определяемой свойствами Sample rate и Decimation factor: κ = Decimation factor/ Sample rate.
Инновационная ковариация является матрицей 6 на 6, используемой для отслеживания изменчивости измерений. Инновационная ковариационная матрица вычисляется как:
где
H - матрица модели наблюдения
P− - предсказанная (априорная) оценка ковариации модели наблюдения, вычисленная в предыдущей итерации
R - ковариация шума модели наблюдения, рассчитанная как:
где
и
Ковариация оценки ошибки является матрицей 12 на 12, используемой для отслеживания изменчивости состояния.
Ковариационная матрица оценки ошибки обновляется следующим образом:
где K - коэффициент усиления Калмана, H - матрица измерений и P− - ковариация оценки ошибки, вычисленная во время предыдущей итерации.
Ковариация оценки ошибки является матрицей 12 на 12, используемой для отслеживания изменчивости состояния. Априорная оценка ошибки, ковариация, P−, устанавливается в ковариацию шума процесса, Q, определенную во время предыдущей итерации. Q вычисляется как функция ковариации оценки апостериорной ошибки, P+. При вычислении Q принято, что условия перекрестной корреляции незначительны по сравнению с терминами автокорреляции и равны нулю:
где
P+ - обновленная (a posteriori) оценка ошибки ковариация
κ -- Коэффициент десятикратного уменьшения, разделенный на частоту дискретизации.
β -- Шум дрейфа гироскопа.
η -- Гироскоп шум.
ν - Коэффициент распада линейного ускорения.
ξ -- Линейный шум ускорения.
σ -- Коэффициент распада магнитных нарушений порядка.
γ -- Магнитное нарушение порядка шум.
Матрица усиления Калмана является матрицей 12 на 6, используемой для взвешивания нововведения. В этом алгоритме нововведение интерпретируется как процесс ошибки, z.
Матрица усиления Калмана построена как:
где
P− -- предсказанная ковариация ошибок
H -- модель наблюдения
S -- инновационная ковариация
Апостериорная оценка ошибки определяется путем объединения матрицы усиления Калмана с ошибкой в оценках вектора гравитации и магнитного вектора:
Если в текущей итерации обнаруживается магнитное глушение, сигнал ошибки магнитного вектора игнорируется, и оценка апостериорной ошибки вычисляется как:
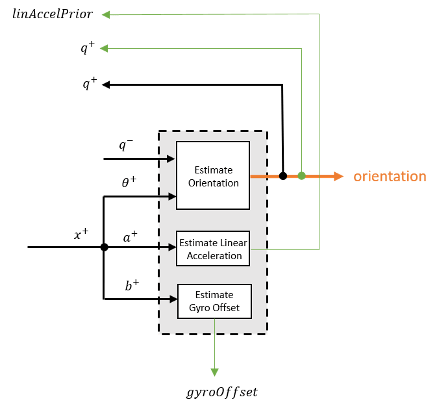
Оценка ориентации обновляется путем умножения предыдущей оценки на ошибку:
Линейная оценка ускорения обновляется путем распада линейной оценки ускорения из предыдущей итерации и вычитания ошибки:
где
ν -- Коэффициент распада линейного ускорения
Оценка смещения гироскопа обновлена, вычтя ошибку смещения гироскопа из смещения гироскопа от предыдущей итерации:
[1] Комплексирование датчиков с открытым исходным кодом. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., H.J. Luinge, C.T.M. Бэтен и П.Х. Велтинк. Компенсация магнитных нарушений порядка улучшает инерционное и магнитное измерение ориентации сегмента тела человека. Транзакции IEEE по нейронным системам и реабилитационной инженерии. Том 13. Выпуск 3, 2005, с. 395-405.
ahrsfilter | ecompass | gpsSensor | imufilter | imuSensor | quaternion

