

Произведение LTE Toolbox™ использует ортогональное частотное деление мультиплексирование (OFDM) в качестве своей цифровой схемы многосветной модуляции. Оценка канала играет важную роль в системе OFDM. Он используется для увеличения пропускной способности систем множественного доступа с ортогональным делением каналов (OFDMA) путем улучшения производительности системы с точки зрения частоты битовой ошибки.
Чтобы облегчить оценку характеристик канала, LTE использует специфические для ячейки опорные сигналы (пилот-символы), вставленные как во времени, так и в частоте. Эти пилот-символы обеспечивают оценку канала в заданных местах внутри подкадра. Посредством интерполяции возможно оценить канал через произвольное количество субкадров.
Символы управления в LTE назначаются положения в подкадре в зависимости от идентификационного номера камеры eNodeB и какая передающая антенна используется, как показано на следующем рисунке.
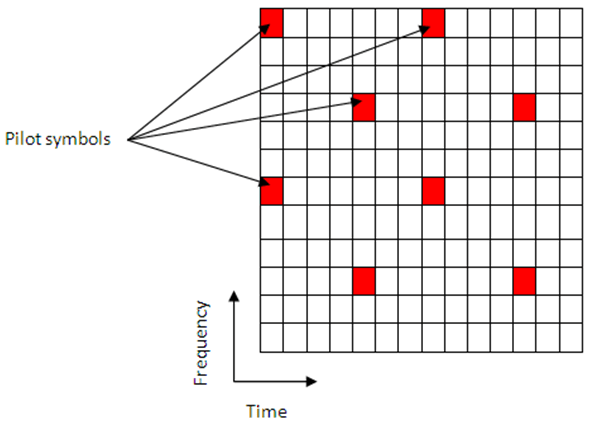
Уникальное позиционирование пилот-сигналов гарантирует, что они не мешают друг другу, и может использоваться, чтобы обеспечить надежную оценку комплексных усилений, приданных каждому ресурсному элементу в переданной сетке каналом распространения.
И цепи передачи и приема, и модель канала распространения показаны на следующем блоке.
![]()
Заполненная ресурсная сетка представляет несколько подкадров, содержащих данные. Эта сетка затем модулируется OFDM и проходит через модель канала распространения. Шум канала в виде аддитивного белого Гауссова шума (AWGN) складывается перед входом сигнала в приемник. Когда внутри приемника сигнал демодулируется OFDM, и может быть создана принятая ресурсная сетка. Принятая ресурсная сетка содержит переданные ресурсные элементы, на которые повлияли комплексные усиления канала и шум канала. Используя известные пилот-символы для оценки канала, можно выравнивать эффекты канала и уменьшать шум на принятой ресурсной сетке.
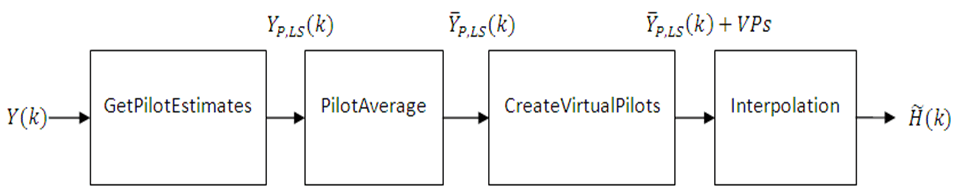
LTE присваивает каждому порту антенны уникальный набор местоположений в подкадре, с которым можно сопоставить опорные сигналы. Поскольку никакая другая антенна не передает данные в этих местоположениях во времени и частоте, оценка канала для строений с несколькими антеннами может быть выполнена. Алгоритм оценки канала извлекает опорные сигналы для пары передающая/приемная антенна из принятой сетки. Оценки частотной характеристики канала методом наименьших квадратов в пилотных символах вычисляются, как описано в оценке канала в системах OFDM [2]. Оценки методом наименьших квадратов затем усредняют, чтобы уменьшить любой нежелательный шум от пилот-символов. Поскольку возможно, что никакие пилот-сигналы не расположены вблизи ребра субкадра, виртуальные пилот-символы создаются, чтобы помочь процессу интерполяции около ребра субкадра. Используя усредненные оценки пилот-символов и вычисленные виртуальные пилот-символы, интерполяция затем выполняется, чтобы оценить весь субкадр. Этот процесс показан на следующем блоке.
Первый этап определения оценки методом наименьших квадратов состоит в том, чтобы извлечь пилот-символы из их известного местоположения в принятом подкадре. Поскольку значение этих пилот-символов известно, реакция канала в этих местоположениях может быть определена с помощью оценки методом наименьших квадратов. Оценка методом наименьших квадратов получена путем деления принятых пилотных символов на их ожидаемое значение.
Где:
является принятым значением комплексного символа.
является переданным значением комплексного символа.
- комплексное усиление канала, испытываемое символом.
Известные пилот-символы могут быть посланы, чтобы оценить канал для подмножества RE в подкадре. В частности, если пилот-символ передается в RE, мгновенная оценка канала для этого RE можно вычислить с помощью:
Где:
представляет принятые значения пилотного символа.
представляет известные переданные значения пилот-символов.
- истинная характеристика канала для RE, занятого символом пилот-сигнала.
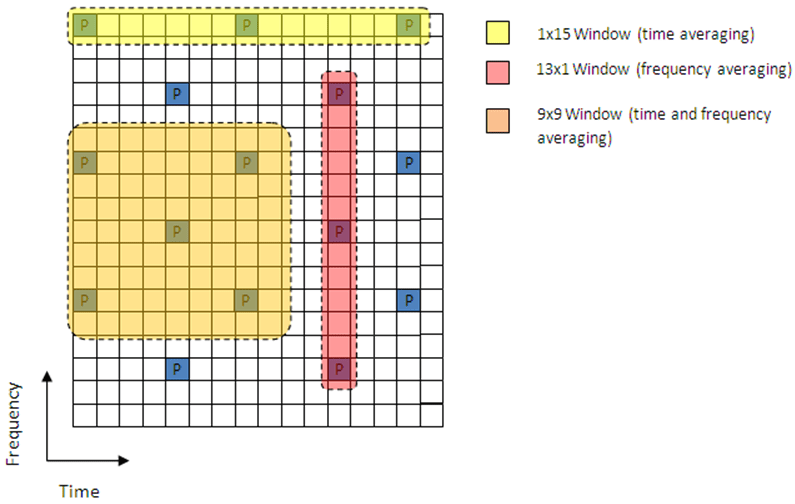
Чтобы минимизировать эффекты шума на оценках канала, наименьшие квадратные оценки усредняются с помощью окна усреднения. Этот простой способ производит значительное снижение уровня шума, обнаруженного в пилотных RE. Доступны следующие два метода усреднения пилотных символов.
'TestEVM' - следует методу, описанному в TS 36.141 [1], приложение F.3.4.
'UserDefined' - позволяет вам задать размер окна и направление усреднения, используемые на пилотных символах плюс другие настройки, используемые для интерполяции.
'TestEVM'Первый метод, 'TestEVM', использует подход, описанный в TS 36.141 [1], приложение F.3.4. Среднее время выполняется по каждой поднесущей, которая содержит пилот-символ, что приводит к вектору-столбцу, содержащей среднюю амплитуду и фазу для каждой поднесущей, которая несет опорный сигнал.
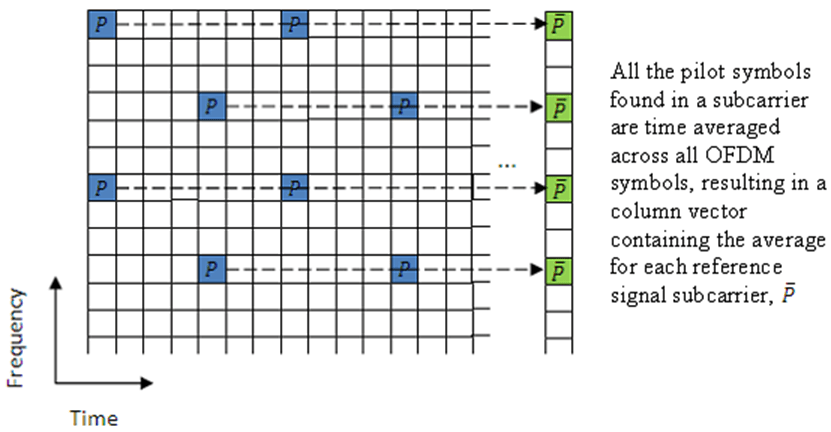
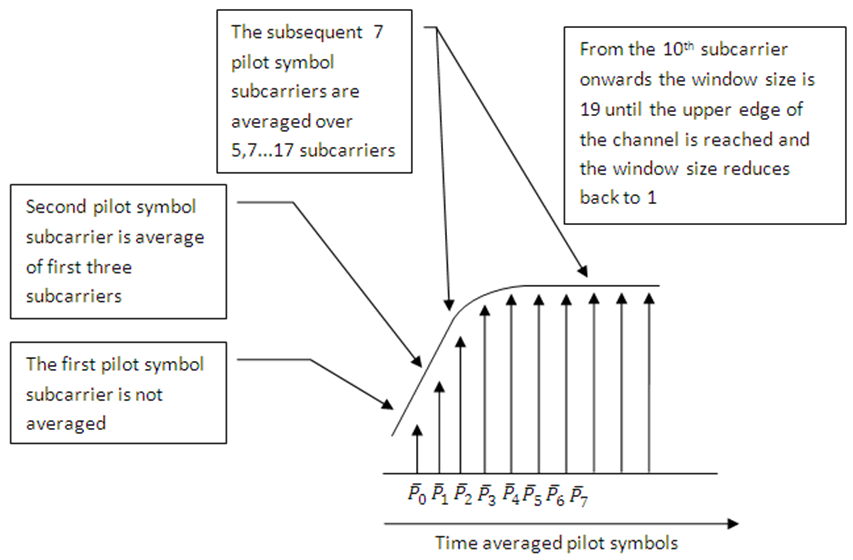
Средние значения поднесущих пилот-символов затем усредняют по частоте, используя скользящее окно максимального размера 19.
Примечание
При использовании 'TestEVM' усреднение пилот-символа, отсутствие пользовательских параметров и невозможность управления параметрами оценки канала. Оценка выполняется с использованием метода, описанного в TS 36.141 [1]. Кроме того, что усреднение по 10 подкадрам не требуется строго. lteDLChannelEstimate функции усредняют по количеству подкадров, включенных во входной rxgrid. Чем больше количество подкадров в rxgrid, чем эффективнее среднее шум в направлении времени.
'UserDefined'Второй способ усреднения пилотного символа, 'UserDefined'позволяет пользователю определять размер окна усреднения, в каком направлении будет выполняться усреднение (время, частота или и то, и другое), и определенные аспекты интерполяции, которые могут быть скорректированы в соответствии с доступными данными. Для получения дополнительной информации см. раздел «Подсистема интерполяции».
Средний размер окна определяется в терминах ресурсных элементов. Любые пилотные символы, расположенные внутри окна, используются для усреднения значения пилотного символа, обнаруженного в центре окна. Размер окна должен быть нечетным числом, гарантирующим наличие пилота в центре.
Примечание
Среднее значение оценок канала в местоположениях символов пилот-сигнала является простым, но мощным инструментом, но размер окна должен быть выбран тщательно. Использование большого размера окна в быстро затухающем канале может привести к усреднению не только шума, но и характеристик канала. Выполнение слишком большого среднего значения в системе с небольшим количеством шума может оказать неблагоприятный эффект на качество оценок канала. Поэтому использование большого окна усреднения для быстро изменяющегося канала может привести к тому, что оценка канала станет плоской, что приведет к плохой оценке канала и повлияет на качество эквализации.
Во многих образцах ребер ресурсной сетки не содержат никаких пилотных символов. Этот эффект показан в ресурсной сетке на следующем рисунке.
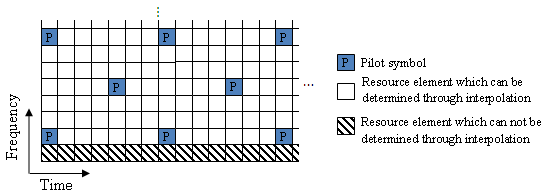
В этом случае оценки канала на ребрах не могут быть интерполированы из пилотных символов. Чтобы преодолеть эту проблему, создаются виртуальные пилотные символы. Функция lteDLChannelEstimate создает виртуальные пилотные символы на всех ребрах полученной сетки, чтобы разрешить кубическую интерполяцию.
Виртуальные пилотные символы создаются как показано на следующем рисунке.
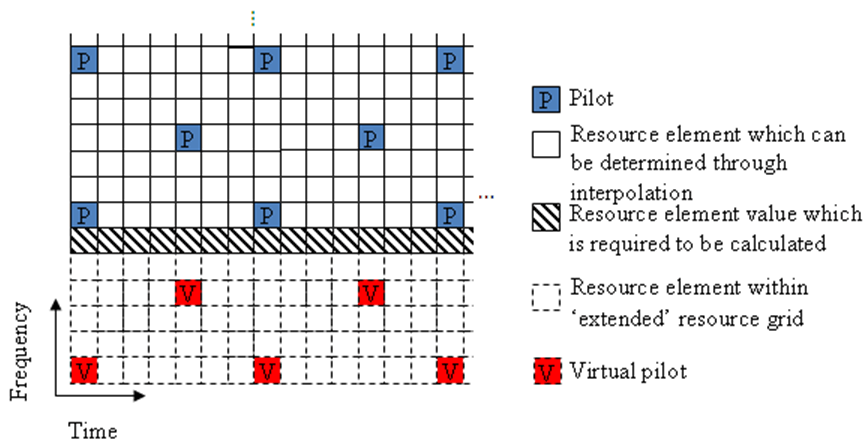
В этой системе ресурсная сетка расширена, с виртуальными пилотными символами, созданными в местах, которые следуют исходному шаблону опорного сигнала. Наличие виртуальных пилотных символов позволяет вычислять оценку канала в ресурсных элементах, которые ранее не могли быть вычислены интерполяцией, путем интерполяции с использованием исходных и виртуальных пилотных символов.
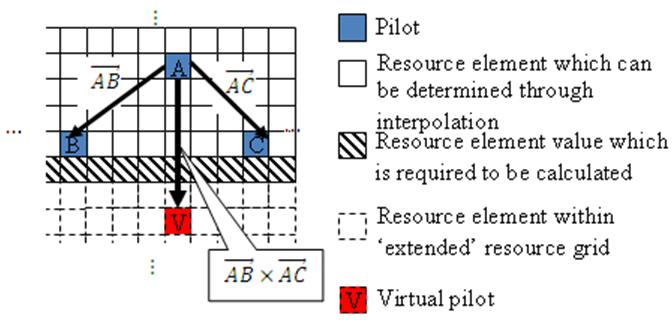
Виртуальные пилотные символы вычисляются с использованием исходных пилотных символов. Для каждого виртуального пилотного символа значение вычисляется на следующих шагах:
Выбираются ближайшие 10 рядовых пилотов по евклидову расстоянию во времени и частоте. Поиск оптимизирован, чтобы учесть 10 этих пилотов, а не проверять всех возможных пилотов. Основываясь на возможных строениях RS камеры, использование 10 пилот-сигналов обеспечивает достаточное временное и частотное разнесение в пилотах для вычисления виртуального пилот-сигнала.
Используя этот набор из 10 пилотов, выбираются ближайшие три символа пилота. Эти три символа должны занимать по меньшей мере две уникальные поднесущие и две уникальные символы OFDM.
Используя этот набор из трех пилотов, создаются два вектора. Один вектор между ближайшим и самым дальним пилот-символами и один вектор между вторым ближайшим и самым дальним пилот-символами.
Перекрестное произведение этих двух векторов вычисляется, чтобы создать плоскость, на которой расположены три точки.
Самолет простирается до положения виртуального пилота, чтобы вычислить значение на основе одного из фактических значений пилот-сигнала.
Эта схема показывает вычисление виртуального пилот-сигнала.
Примечание
Виртуальные пилоты создаются только для MATLAB® 'linear' и 'cubic' методы интерполяции.
После уменьшения или удаления шума из средних значений пилот-символов методом наименьших квадратов и определения достаточного количества виртуальных пилот-сигналов можно использовать интерполяцию, чтобы оценить отсутствующие значения из сетки оценки канала. lteDLChannelEstimate функция имеет два метода усреднения пилотных символов, 'TestEVM' и 'UserDefined'. Способы усреднения пилот-символа также определяют способ интерполяции, выполненный для получения оценки канала.
The 'TestEVM' способ усреднения пилот-сигнала, описанный в TS 36.141 [1], приложение F.3.4, требует использования простой линейной интерполяции на усредненных по времени и усредненных по частоте векторах-столбцах. Интерполяция является одномерной, поскольку она только оценивает значения между усредненными поднесущими пилот-символов в вектор-столбец. Получившийся вектор затем реплицируется и используется как оценка канала для всей ресурсной сетки.
The 'UserDefined' способ усреднения пилот-сигнала выполняет двумерную интерполяцию, чтобы оценить характеристику канала между доступными пилотными символами. Окно интерполяции используется, чтобы указать, какие данные используются для выполнения интерполяции. The InterpWindow поле определяет причинно-следственную связь имеющихся данных. Допустимые настройки для cec. InterpWindow являются 'Causal', 'Non-causal', или 'Centered'.
Используйте InterpWindow настройка:
'Causal' при использовании прошлых данных.
'Non-causal' при использовании будущих данных. Это противоположно 'Causal'. Опора только на будущие данные обычно упоминается как антикаузальный метод интерполяции.
'Centered' или 'Centred' при использовании комбинации прошлых, настоящих и будущих данных.
Размер этого окна интерполяции также может быть скорректирован в соответствии с доступными данными. Чтобы задать размер окна, установите InterpWinSize поле.
Эффективность некоторых приемников может быть улучшена посредством знания о степенях шума, присутствующих на принимаемом сигнале. Функция lteDLChannelEstimate предоставляет оценку спектральной плотности степени шума (PSD), используя оцененную характеристику канала в известных местах опорного сигнала. Степень шума может быть определена путем анализа шумовых оценок методом наименьших квадратов и средних оценок шума.
Шумные оценки методом наименьших квадратов из Подсистемы Get Pilot Estiments и оценки пилот-символа со средним шумом из Подсистемы среднего пилот-сигнала обеспечивают индикацию шума канала. Оценки методом наименьших квадратов и усредненные оценки содержат одинаковые данные, кроме аддитивного шума. Простое взятие различия между двумя оценками приводит к значению уровня шума для оценок канала методом наименьших квадратов в местоположениях символов пилот-сигнала. Принимая во внимание снова,
Усредняя мгновенные оценки канала по сглаживающему окну, мы имеем
где S - набор пилотов в сглаживающем окне, а |S| - количество пилотов в S. Таким образом, оценка шума в конкретном пилотном RE может быть сформирована с использованием:
На практике невозможно удалить весь шум с помощью усреднения. Поскольку можно только уменьшить шум, можно сделать только оценку степени шума.
Примечание
В случае системы, свободной от шума, или системы с высоким ОСШ, усреднение может оказать пагубный эффект на качество оценок методом наименьших квадратов.
Используя значение степени шума, обнаруженной в отклике канала в местоположениях символов пилот-сигнала, степень шума на ресурсный элемент (RE) может быть вычислена путем взятия отклонения полученного вектора шума. Шумовая степень на RE для каждой пары передающей и приемной антенны вычисляется и сохраняется. Среднее значение этой матрицы возвращается как оценка степени шума на RE.
Для демонстрации того, как настроить полную цепь передачи и приема для оценки канала, смотрите Симуляцию пропускной способности разнесения передачи PDSCH. В этом примере используется несколько антенн, и передача моделируется с помощью модели канала распространения.
[1] 3GPP TS 36.141. "Evolved Universal Terrestrial Radio Access (E-UTRA); Base Station (BS) Conformance Проверки. "3rd Генерация Partnership Project; Группа технических спецификаций Радиосеть доступ. URL-адрес: https://www.3gpp.org.
[2] Van de Beek, J.-J., O. Edfors, M. Sandell, S. K. Wilson, and P. O. Borjesson. «Об оценке канала в системах OFDM». Конференция по автомобильным технологиям, IEEE 45-й, том 2, IEEE, 1995.
lteDLChannelEstimate | lteEqualizeMMSE | lteEqualizeZF | lteOFDMDemodulate