Симулируйте датчик INS
Навигационный тулбокс/мультисенсорное позиционирование/модели датчика
Sensor Fusion and Tracking Toolbox/Мультисенсорные модели позиционирования/датчика
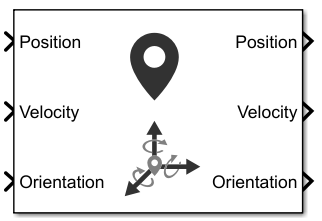
Блок моделирует датчик INS, который выводит поврежденное шумом положение, скорость и ориентацию на основе соответствующих входов. Чтобы изменить уровень шума, присутствующего в выходе, можно изменить крен, тангаж, рыскание, положение и точности скорости. Точность определяется как стандартное отклонение шума.
Position - Положение датчика INSПоложение датчика INS относительно навигационной системы координат, заданное как N-на-3 матрица скаляров. N - количество выборок .
Типы данных: single | double
Velocity - Скорость датчика INSСкорость датчика INS относительно навигационной системы координат, заданная как N-на-3 матрица скаляров. N - количество выборок .
Типы данных: single | double
Orientation - Ориентация датчика ИНСОриентация датчика INS относительно навигационной системы координат, заданная как или массив скаляров N 3 на 3 байта, где каждая страница массива (матрица 3 на 3) является матрицей вращения или как матрица скаляров N на 4, где каждая строка матрицы является четырьмя элементами массива кватерниона. N - количество выборок .
Типы данных: single | double
Position - Положение датчика INSПоложение датчика INS относительно навигационной системы координат, возвращаемое как N-на-3 матрица скаляров. N - количество выборок во входе .
Типы данных: single | double
Velocity - Скорость датчика INSСкорость датчика INS относительно навигационной системы координат, возвращаемая как N-на-3 матрица скаляров. N - количество выборок во входах .
Типы данных: single | double
Orientation - Ориентация датчика ИНСОриентация INS-датчика относительно навигационной системы координат, возвращаемая либо как 3х3-бай- N массив скаляров, где каждая страница массива (матрица 3х3) является матрицей вращения, либо N-х4-матрица скаляров, где каждая строка матрицы является четыре элементов массива кватернионом. Точный тип выхода ориентации следует типу входа ориентации. N - количество выборок во входе.
Типы данных: single | double
Roll (X-axis) Accuracy (deg) - Точность измерения крена (град)0.2 (по умолчанию) | неотрицательным вещественным скаляромТочность измерения крена тела датчика в степенях, заданная как неотрицательный действительный скаляр.
Крен определяется как вращение вокруг оси x тела датчика. Шум крена моделируется как шум белого процесса со стандартным отклонением, равным заданному Roll accuracy в степенях.
Типы данных: single | double
Pitch (Y-axis) Accuracy (deg) - Точность измерения тангажа (град)0.2 (по умолчанию) | неотрицательным вещественным скаляромТочность измерения тангажа тела датчика в степенях, заданная как неотрицательный действительный скаляр.
Тангаж задается как вращение вокруг оси y тела датчика. Шум тангажа моделируется как шум белого процесса со стандартным отклонением, равным заданному Pitch Accuracy в степенях.
Типы данных: single | double
Yaw (Z-axis) Accuracy (deg) - Точность измерения рыскания (град.)1 (по умолчанию) | неотрицательным вещественным скаляромТочность измерения рыскания тела датчика в степенях, заданная как неотрицательная действительная скаляра.
Рыскание определяется как вращение вокруг оси z тела датчика. Шум рыскание моделируется как шум белого процесса со стандартным отклонением, равным заданному Yaw Accuracy в степенях.
Типы данных: single | double
Position Accuracy (m) - Точность измерения положения (град)1 (по умолчанию) | неотрицательным вещественным скаляромТочность измерения положения корпуса датчика в метрах, заданная как неотрицательный действительный скаляр.
Позиционный шум моделируется как белый технологический шум со стандартным отклонением, равным заданному Position Accuracy в степенях.
Типы данных: single | double
Velocity Accuracy (m/s) - Точность измерения скорости (град)1 (по умолчанию) | неотрицательным вещественным скаляромТочность измерения скорости тела датчика в метрах в секунду, заданная как неотрицательная действительная скаляра.
Шум скорости моделируется как шум белого процесса со стандартным отклонением, равным заданному Velocity Accuracy в степенях.
Типы данных: single | double
Intial Seed - Начальный seed для рандомизации67 (по умолчанию) | неотрицательное целое числоНачальное начальное число алгоритма генератора случайных чисел, заданное в виде неотрицательного целого числа.
Типы данных: single | double
Simulate using - Тип выполняемой симуляцииInterpreted Execution (по умолчанию) | Code GenerationInterpreted execution - Симулируйте модель с помощью MATLAB® интерпретатор. Эта опция сокращает время запуска. В Interpreted execution mode, можно отлаживать исходный код блока.
Code generation - Симулируйте модель с помощью сгенерированного кода C. Первый раз, когда вы запускаете симуляцию, Simulink® генерирует код С для блока. Код С повторно используется для последующих симуляций, если модель не меняется. Эта опция требует дополнительного времени запуска.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
