Оцените целевое направление из суммы и разностных каналов
Phased Array System Toolbox/Направление прибытия
Этот Monopulse Estimator оценивает направление прихода узкополосного сигнала на основе начального предположения путем применения амплитудной моноимпульсной обработки к суммарным и разностным сигналам канала, принимаемым массивом. Можно создать эти каналы с помощью блока Monopulse Feed.
Monopulse coverage - Направления покрытия моноимпульса3D (по умолчанию) | AzimuthНаправления покрытия моноимпульса, заданные как 3D или Azimuth. Когда вы устанавливаете этот параметр 3Dблок оценки моноимпульса использует суммарный канал и оба канала азимута и повышения различия. Когда вы устанавливаете этот параметр Azimuthблок оценки моноимпульса использует суммарный канал и азимутальный разностный канал.
Squint angle (degrees) - Угол косоглазия10 (по умолчанию) | скалярный | действительный вектор 2 на 1Угол косоглазия, заданный как скаляр или реальный вектор 2 на 1. Угол косоглазия является углом разделения между суммарной балкой и балками в азимутальном и вертикальном направлениях.
Когда вы устанавливаете Monopulse coverage параметр в Azimuth, установите Squint angle параметр скаляру.
Когда вы устанавливаете Monopulse coverage параметр в 3D, можно задать угол косоглазия как скаляр или вектор. Если вы задаете Squint angle параметр скаляру, угол косоглазия одинаковый как по азимуту, так и по повышению направлениям. Если вы задаете Squint angle параметр вектору 2 на 1, его элементы определяют угол косоглазия вдоль направления азимута и повышения.
Пример: [20;5]
Output format - Формат выходного направленияAngle (по умолчанию) | Angle offsetФормат выхода направления, заданный Angle или Angle offset. Когда вы устанавливаете этот параметр Angleпорт выхода маркирован AzEl или Az и является фактическим направлением цели. Когда вы устанавливаете это свойство на Angle offsetпорт выхода маркирован dAzEl или dAz и - смещение угла цели от направления поворота массива.
Output sum difference ratio - Включите выходной порт коэффициента суммарной разностиoff (по умолчанию) | onУстановите этот флажок, чтобы вывести отношение суммы и разностных каналов в направлениях азимута и повышения. Когда вы устанавливаете Monopulse coverage на Azimuthблок выводит отношение различия сумма-азимут с помощью AzRatio порт. Когда вы устанавливаете Monopulse coverage на 3Dблок выводит отношение суммарно-азимутальное различие и суммарно-вертикальное различие каналов с помощью AzElRatio порт.
Generate Monopulse Feed - Создайте моноимпульсный блок питанияНажмите эту кнопку, чтобы создать Monopulse Feed блок на основе параметров этого блока.
Input Pattern Coordinate System - Система координат пользовательского шаблона антенныaz-el (по умолчанию) | phi-thetaСистема координат пользовательского шаблона антенны, заданная az-el или phi-theta. Когда вы задаете az-elиспользуйте параметры Azimuth angles (deg) и Elevations angles (deg), чтобы задать координаты точек шаблона. Когда вы задаете phi-thetaиспользуйте параметры Phi angles (deg) и Theta angles (deg), чтобы задать координаты точек шаблона.
Чтобы включить этот параметр, установите Element type равным Custom Antenna.
Phi Angles (deg) - Координаты угла Phi пользовательского диаграммы направленности антенн0:360 | вектор-строку 1-by P с реальным значениемУглы Phi точек, в которых можно задать диаграмму направленности антенного излучения, задаются как действительный вектор-строка 1 P by. P должно быть больше 2. Угловые модули находятся в степенях. Углы Phi должны лежать между 0 ° и 360 ° и находиться в строго увеличивающемся порядке.
Чтобы включить этот параметр, установите параметр Element type равным Custom Antenna и параметр Input Pattern Coordinate System для phi-theta.
Theta Angles (deg) - Координаты угла theta пользовательского диаграммы направленности антенн0:180 | вектор-строку 1-by Q с реальным значениемTheta точек, в которых можно задать диаграмму направленности антенного излучения, задаются как действительный вектор-строка Q 1 байта. Q должно быть больше 2. Угловые модули находятся в степенях. Theta должны лежать между 0 ° и 360 ° и находиться в строго увеличивающемся порядке.
Чтобы включить этот параметр, установите параметр Element type равным Custom Antenna и параметр Input Pattern Coordinate System для phi-theta.
MatchArrayNormal - Вращайте антенный элемент к нормали решеткиon (по умолчанию) | offУстановите этот флажок, чтобы повернуть шаблон антенного элемента, чтобы выровниться по нормали массива. Если не выбран, шаблон элемента не поворачивается.
Когда антенна используется в антенной решетке, и параметр Input Pattern Coordinate System az-el, установка этого флажка поворачивает шаблон так, чтобы ось x системы координат элемента указала вдоль нормали массива. Не выбирая, используется шаблон элемента без поворота.
Когда антенна используется в антенную решетку, и Input Pattern Coordinate System установлено на phi-theta, установка этого флажка поворачивает шаблон так, чтобы ось z системы координат элемента указала вдоль нормали массива.
Используйте параметр в сочетании с параметром Array normal URA и UCA массивы.
Чтобы включить этот параметр, установите Element type равным Custom Antenna.
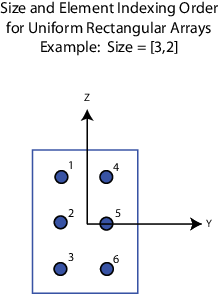
Размерности массива URA, заданные как положительное целое число или вектор 1 на 2 положительных целых чисел.
Если Array size является вектором 1 на 2, вектор имеет вид [NumberOfArrayRows,NumberOfArrayColumns].
Если Array size является целым числом, массив имеет одинаковое является целым числом, массив имеет одинаковое число строк и столбцов.
Когда вы задаете Specify sensor array as Replicated subarrayэтот параметр применяется к каждой подрешетке.
Для URA элементы массива индексируются сверху вниз вдоль крайнего левого столбца, а затем переходят к следующим столбцам слева направо. На этом рисунке Array size значение [3,2] создает массив, содержащий три строки и два столбца.
Чтобы включить этот параметр, установите Geometry равным URA.
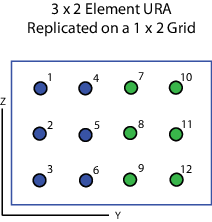
Прямоугольный размер сетки подрешетки, заданный как одно положительное целое, или вектор-строка 1 на 2 положительных целых чисел.
Если Grid size является целочисленным скаляром, массив имеет равное количество подрешеток в каждой строке и столбце. Если Grid size является вектором вида 1 на 2 [NumberOfRows, NumberOfColumns]первая запись - это количество подрешеток вдоль каждого столбца. Вторая запись - это количество подрешеток в каждой строке. Строка расположена вдоль локальной оси y, а столбец - вдоль локальной оси z. Рисунок здесь показывает, как можно реплицировать подрешетку URA 3 на 2 с помощью Grid size [1,2].
Чтобы включить этот параметр, установите Sensor array равным Replicated subarray и Subarrays layout к Rectangular.
