MUltiple SIgnal Classification (MUSIC) является алгоритмом наведения направления с высоким разрешением, основанным на собственном разложении сенсорной ковариационной матрицы, наблюдаемом в массиве. MUSIC принадлежит к семейству основанных на подпространстве алгоритмов определения направления.
Модель сигнала связывает полученные данные датчика с сигналами, излучаемыми источником. Предположим, что существует D некоррелированных или частично коррелированных источников сигнала, sd(t). Данные о датчике, xm(t), состоят из сигналов, принимаемых в массиве, вместе с шумом, nm(t). Моментальный снимок данных датчика - это вектор данных датчика, принятый в M элементах массива в один временной t.
x(t) является M-на-1 вектором полученного снимка данных датчика, которые состоят из сигналов и аддитивного шума.
A является M -by - D матрицей, содержащей векторы прибытия. Вектор прибытия состоит из относительных сдвигов фазы в элементах массива плоской волны от одного источника. Каждый столбец A представляет вектор прибытия из одного из источников и зависит от направления прибытия, θd. θd - направление угла прихода для d-го источника и может представлять собой широкий угол для линейных массивов или азимут и угол возвышения для плоских или 3D массивов.
s(t) является вектором D -by-1 значений сигналов источника от источников D.
n(t) является вектором M -by-1 значений шума датчика.
Важной величиной в любом субпространственном способе является sensor covariance matrix, Rx, выведенная из данных принимаемого сигнала. Когда сигналы некоррелированы с шумом, ковариационная матрица датчика имеет две компоненты, signal covariance matrix и noise covariance matrix.
где Rs - source covariance matrix. Диагональные элементы исходной ковариационной матрицы представляют степень источника, а недиагональные элементы представляют корреляции источника.
Для некоррелированных источников или даже частично коррелированных источников Rs является положительно-определённой эрмитовой матрицей и имеет полный ранг, D, равный количеству источников.
Ковариационная матрица сигнала, ARsAH, является M -by - M матрицей, также с рангом D < M.
Предположение алгоритма MUSIC состоит в том, что степени равны на всех датчиках и некоррелированы между датчиками. При этом предположении шумовая ковариационная матрица становится M -by M диагональной матрицей с равными значениями по диагонали.
Поскольку истинная ковариационная матрица датчика не известна, MUSIC оценивает ковариационную матрицу датчика, Rx, из ковариационной матрицы датчика выборки. Ковариационная матрица датчика выборки является средним значением нескольких снимков данных датчика
где T количество моментальных снимков.
Потому что ARsAH имеет ранг D, имеет D положительных реальных собственных значений и M – D нулевых собственных значений. Собственные векторы, соответствующие положительным собственным значениям, охватывают signal subspace, Us= [v1,...,vD]. Собственные векторы, соответствующие нулевым собственным значениям, ортогональны пространству сигналов и охватывают null subspace, Un= [uD+1,...,uN]. Векторы прихода также принадлежат подпространству сигнала, но они являются собственными векторами. Собственные векторы ядра подпространства ортогональны собственным векторам сигнала подпространства. Ядро-подпространственные собственные векторы, ui, удовлетворяют этому уравнению:
Поэтому векторы прихода ортогональны нулевому подпространству.
При добавлении шума собственные векторы сенсорной ковариационной матрицы с присутствующим шумом те же, что и ковариационная матрица без шума. Собственные значения увеличиваются на степень шума. Позвольте vi быть одним из исходных свободных от шума сигнальных пространств собственных векторов. Тогда
Показы, что пространство сигналов собственными значениями увеличения2.
Ядро подпространства собственных векторов также являются собственными векторами Rx. Предположим ui что это один из нулевых собственных векторов. Тогда
с собственными значениями2 вместо нуля. Ядро подпространства становится noise subspace.
MUSIC работает путем поиска всех векторов прихода, которые ортогональны подпространству шума. Для выполнения поиска MUSIC создает зависимое от угла прибытия степень, называемое псевдоспектром MUSIC:
Когда вектор прихода ортогональен подпространству шума, peaks псевдоспектра бесконечны. На практике, поскольку существует шум, и поскольку истинная ковариационная матрица оценивается дискретизированной ковариационной матрицей, векторы прихода никогда не являются в точности ортогональными подпространству шума. Затем углы, при которых PMUSIC имеет конечный peaks, являются желаемыми направлениями прибытия. Поскольку псевдоспектр может иметь больше peaks, чем есть источники, алгоритм требует, чтобы вы указали количество источников, D, как параметр. Затем алгоритм выбирает D большой peaks. Для равномерного линейного массива (ULA) пространство поиска является одномерной сеткой с широкими боковыми углами. Для плоских и 3D массивов пространство поиска является двумерной сеткой азимута и углов возвышения.
Для ULA знаменатель в псевдоспектре является полиномом в , но также может рассматриваться как полином в комплексной плоскости. В этих случаях можно использовать методы корневого поиска, чтобы решить для корней, zi. Эти корни не обязательно лежат на модуль круге. Однако Root-MUSIC принимает, что наиболее близкие к модулю кругу корни D соответствуют истинным исходным направлениям. Затем можно вычислить исходные направления из фазы сложных корней.
Когда некоторые из D сигналов источника коррелируются, Rs имеет дефицит ранга, что означает, что он имеет меньше, чем D ненулевых собственных значений. Поэтому количество нулевых собственных значений ARsAH превышает число, M – D, нулевых собственных значений для некоррелированного исходного случая. Эффективность MUSIC ухудшается, когда сигналы коррелируются, как это происходит в окружении распространения. Способ компенсировать корреляцию - использовать пространственное сглаживание.
Spatial smoothing использует свойства преобразования однородного массива. Рассмотрим два коррелированных сигнала, поступающих в ULA L-element. Исходная ковариационная матрица, Rs является сингулярной матрицей 2 на 2. Матрица векторов прихода является матрицей L -by-2
для сигналов, поступающих с широких углов φ1 и φ2. Величина k является числом сигнальной волны. a(φ) представляет вектор прихода в φ угла.
Можно создать второй массив путем перемещения первого массива вдоль его оси на расстояние одного элемента, d. Матрица прибытия для второго массива
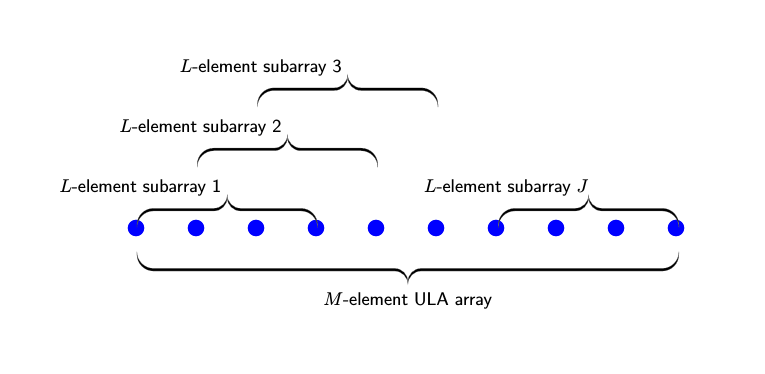
где векторы прихода равны исходным векторам прихода, но умножены на зависящий от направления сдвиг фазы. Когда вы переводите исходный массив J –1 большее количество раз, вы получаете J копии массива. Если вы формируете один массив из всех этих копий, то длина одинарного массива M = L + (J – 1).
На практике вы начинаете с массива M-element и формируете J перекрывающиеся подрешеток. Количество элементов в каждой подрешетке L = M – J + 1. Следующий рисунок показывает отношение между общей длиной массива, M, количеством подрешеток, J и длиной каждой подрешетки, L.
Для p-го подрешетки матрица поступления исходного сигнала
Исходная векторная матрица прихода постмультифицируется диагональной фазовой матрицей.
Последним шагом является усреднение ковариационных матриц сигнала по всем < reservedrangesplaceholder0 > подрешеткам, чтобы сформировать усредненную ковариационную матрицу сигнала Ravgs. Средняя ковариационная матрица сигнала зависит от сглаженной исходной ковариационной матрицы, Rsmooth.
Можно показать, что диагональные элементы сглаженной исходной ковариационной матрицы те же, что и диагональные элементы исходной исходной ковариационной матрицы.
Однако не-диагональные элементы уменьшены. Коэффициент сокращения является диаграммой направленности массива J -элемент.
Сводные данные, можно уменьшить ухудшающий эффект корреляции источника путем формирования подрешеток и использования сглаженной ковариационной матрицы в качестве входа в алгоритм MUSIC. Из-за диаграммы направленности большее угловое разделение источников приводит к уменьшенной корреляции.
Пространственное сглаживание для линейных массивов легко расширяется до 2D и 3D однородных массивов.
