Гидропривод вращения двойного действия
Гидравлические Цилиндры

Блок Double-Acting Rotary Actuator моделирует гидропривод вращения двойного действия, который непосредственно преобразует энергию жидкости в механическую энергию вращения, не используя промежуточных передач, таких как реечный механизм, скользящий шлиц, цепь и так далее. Гидравлическая жидкость, нагнетаемая под давлением в одну из двух полостей привода, заставляет вращение вала и генерация крутящего момента. Приводы двойного действия генерируют крутящий момент и движение в обоих направлениях.
Модель привода построена из библиотечных блоков Simscape™ Foundation. Принципиальная схема модели представлена ниже.
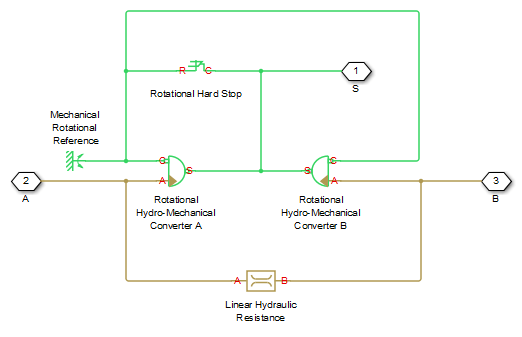
Блоки в схеме выполняют следующие функции:
| Rotational Hydro-Mechanical Converter A | Преобразует энергию гидравлики в механическую энергию вращения, когда жидкость перекачивается в полость привода, с учетом сжимаемости жидкости. |
| Rotational Hydro-Mechanical Converter B | Преобразует энергию гидравлики в механическую энергию вращения, когда жидкость перекачивается в полость привода, с учетом сжимаемости жидкости. |
| Rotational Hard Stop | Накладывает пределы на вращение вала. |
| Linear Hydraulic Resistance | Учитывает утечки. |
Связи A и B являются гидравлическими портами. Порт А соединяет ёмкость A, порт B соединяет ёмкость B. Связь S является портом механического вращений, связанным с валом привода.
Направление блока регулируется и может управляться с помощью параметра Actuator orientation.
Никакие загрузки, такие как инерция, трение, пружина и так далее, не учитываются. При необходимости можно легко добавить их, подключив соответствующий базовый блок к порту S.
Эффективное перемещение привода. Значение по умолчанию 4.5e-5 м ^ 3/рад.
Максимальное перемещение вала между упорами. Значение по умолчанию 5.1 рад.
Положение вала в начале симуляции. Положение вала можно задать на любой угол в пределах его штриха. Значение по умолчанию 0, что соответствует положению вала в самом начале штриха.
Объем жидкости в полости А, который остается в ёмкости, когда вал расположен в самом начале штриха. Значение по умолчанию 1e-4 м ^ 3.
Объем жидкости в полости В, который остается в ёмкости, когда вал расположен на конце штриха. Значение по умолчанию 1e-4 м ^ 3.
Коэффициент утечек для блока Линейного Гидравлического Сопротивления. Значение по умолчанию 1e-14 (м ^ 3/с )/Па.
Коэффициент удельной теплоемкости для Блока Емкости Гидравлического Поршня. Значение по умолчанию 1.4.
Задает свойство упругости сталкивающихся тел для Блок Упора Вращения. Чем больше значение параметра, тем меньше тела проникают друг в друга, тем более жестким становится влияние. Меньшее значение параметра делает контакт более мягким, но в целом улучшает сходимость и вычислительную эффективность. Значение по умолчанию 1e6 Н * м/рад.
Задает свойство демпфирования сталкивающихся тел для Блок Упора Вращения. При нулевом демпфировании влияние близко к абсолютно упругому. Чем больше значение параметра, тем больше энергии рассеивается во время взаимодействия. Следует иметь в виду, что демпфирование влияет на движение поршня, пока он находится в контакте с ограничителем, включая период, когда ползун выходит из контакта. По причинам вычислительной эффективности и сходимости MathWorks рекомендует присвоить ненулевое значение этому параметру. Значение по умолчанию является 150 Н * м/( рад/с).
Методы моделирования для жёстких упоров. Опции включают:
Stiffness and damping applied smoothly through transition region (по умолчанию) - Масштабируйте амплитуду контактной силы от нуля до ее полного значения на заданной длине перехода. Масштабирование носит полиномиальный характер. Функция масштабирования полинома численно сглажена и не производит нулевых пересечений любого вида.
Full stiffness and damping applied at bounds, undamped rebound - Приложите полное значение расчетной контактной силы при нарушении местоположения жёсткого упора. Сила контакта представляет собой смесь пружины и демпфирующих сил во время проникновения и упругой силы - без демпфирующей составляющей - во время отскока. Сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound - Приложите полное значение расчетной контактной силы при нарушении местоположения жёсткого упора. Сила контакта представляет собой смесь пружины и демпфирующих сил во время как проникновения, так и отскока. Сглаживание не применяется. Это жёсткий упор, используемая в предыдущих релизах.
Расстояние, ниже которого масштабирование прикладывается к жёсткому упору. Сила контакта равна нулю, когда расстояние до жёсткого упора равно значению, заданному здесь. Это при полном значении, когда расстояние до жёсткого упора равняется нулю. Значение по умолчанию 1 mm..
Задает ориентацию привода относительно глобально присвоенного положительного направления. Привод может быть установлен двумя различными способами, в зависимости от того, создает ли он крутящий момент в положительном или отрицательном направлении, когда давление прикладывается к его входному отверстию. Если давление, приложенное к порту А, генерирует крутящий момент в отрицательном направлении, установите параметр равным Acts in negative direction. Значение по умолчанию Acts in positive direction.
Параметр, определяемый типом рабочей жидкости:
Fluid bulk modulus
Используйте блок Hydraulic Fluid или блок Custom Hydraulic Fluid, чтобы задать свойства жидкости.
Блок имеет следующие порты:
AГидравлический порт, сопоставленный с полостью привода
BГидравлический порт, сопоставленный с полостью привода.
SПорт Механического привода вращения, сопоставленный с валом.
