Сервоцилиндр двойного действия с пружинным золотником в изотермической гидравлической системе
Simscape/Жидкости/Приводы Клапана и Силы

Блок Double-Acting Servo Valve Actuator (IL) моделирует сервоцилиндр двойного действия, расположенную как центрированный пружиной золотник. Положение пружины нейтраль, где золотник расположен в середине штриха. Движение поршня, когда он близок к полному удлинению или полному уборке, ограничено одной из трех моделей жёсткого упора. Сжимаемость жидкости опционально моделируется в обеих поршневых камерах.
Выходной P физического сигнала сообщает положение золотника.
Чтобы избежать механических повреждений привода, когда он полностью выдвинут или полностью втянут, привод обычно отображает нелинейное поведение, когда поршень приближается к этим пределам. Блок Привод Сервоклапана Двойного Действия (IL) моделирует это поведение с выбором трех моделей жёсткого упора, которые моделируют податливость материала через систему пружины-демпфера. Модели жёсткого упора:
Stiffness and damping applied smoothly through transition region, damped rebound.
Full stiffness and damping applied at bounds, undamped rebound.
Full stiffness and damping applied at bounds, damped rebound.
Жёсткий упор моделируется, когда поршень находится на своей верхней или нижней границе. Граничная область находится в Transition region начального хода Spool stroke или поршня. За пределами этой области,
Дополнительные сведения об этих настройках см. на странице блока Translational Hard Stop.
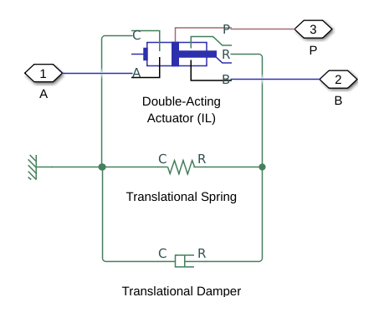
Блок Servo Привода двойного действия содержит Изотермический Жидкий библиотечный блок и два блока Simscape Foundation:
Привод двойного действия (G-IL) | Привод двойного действия (IL) | Вращательный привод двойного действия (IL) | Гидропривод одностороннего действия (IL)
