Мотор постоянного объема в изотермической гидравлической системе
Simscape/Жидкости/Изотермическая жидкость/Насосы и двигатели

Блок Двигатель Постоянной Производительности (IL) моделирует двигатель с постоянным объемом хода. Жидкость может перемещаться от порта A к порту B, вызываемому прямым режимом или от порта B к порту A, называемому реверсивным режимом. Операция моторного режима происходит, когда происходит перепад давления в направлении потока. Операция режима насоса происходит, когда происходит перепад давления в направлении потока.
Вращению вала соответствует знак объема жидкости, движущейся через двигатель. Положительное перемещение жидкости при соответствует положительному вращению вала в переднем режиме. Отрицательное перемещение жидкости соответствует отрицательной угловой скорости вала в прямом режиме.
Операции
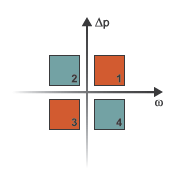
Режим 1, Прямое движение: Поток от порта A к порту B вызывает уменьшение давления с A до B и положительную угловую скорость вала.
Режим 2, Реверсивный насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта B до порта A и поток от B до порта A.
Режим 3, Реверсивный мотор: Поток от порта B к порту A вызывает снижение давления от B до A и отрицательную угловую скорость вала.
Режим 4, Прямой насос: Положительная угловая скорость вала вызывает увеличение давления от порта A до порта B и поток от A до B.
Блок мотора имеет аналитическую, интерполяционную таблицу и параметры физического сигнала. При использовании табличных данных или входного сигнала для параметризации можно принять решение охарактеризовать операцию двигателя на основе эффективности или потерь.
В табличных данных и опциях параметризации входного сигнала пороговые параметры Pressure drop threshold for motor-pump transition и Angular velocity threshold for motor-pump transition идентифицировать области, где может происходить численно сглаженный переход потока между рабочими режимами двигателя. Выберите переходную область, которая обеспечивает некоторый запас для переходного термина, но которая достаточно мала относительно давления и скорости вращения, чтобы она не повлияла на результаты вычисления.
Если вы задаете Leakage and friction parameterization Analyticalблок вычисляет утечки и трение из постоянных значений скорости вала, перепада давления и крутящего момента трения. Значение уровня утечек, которое коррелирует с перепадом давления над двигателем, вычисляется как:
где:
Δp nom - это Nominal pressure drop.
ρ avg - средняя плотность жидкости.
K - коэффициент Хагена-Пуазейля для аналитических потерь,
где:
D является Displacement.
ω nom - это Nominal shaft angular velocity.
η v, nom есть Volumetric efficiency at nominal conditions.
Δp nom - это Nominal pressure drop.
Крутящий момент трения, который коррелирует с угловой скоростью вала, вычисляется как:
где:
τ 0 является No-load torque.
k - крутящий момент трения от коэффициента перепада давления при номинальном перемещении, который определяется из Mechanical efficiency at nominal conditions, ηm:
τfric - крутящий момент трения в номинальных условиях:
Δp - перепад давления между портами A и B.
ω - относительная угловая скорость вала, или .
При использовании табличных данных для КПД или потерь двигателя можно предоставить данные для одного или нескольких режимов работы двигателя. Знаки табличных данных определяют режим работы блока. Когда данные предоставляются менее чем для четырех рабочих режимов, блок вычисляет дополнительные данные для другого режима (ов) путем расширения данных в оставшиеся квадранты.
Tabulated data - volumetric and mechanical efficiencies параметризацияЗначение уровня утечек определяется как:
где:
и η v - объемный КПД, который интерполируется из предоставленных пользователем табличных данных. Переходный термин, α, является
где:
Δp p A - p B.
p порог является Pressure drop threshold for motor-pump transition.
ω представляет ω R - ω C.
ω порог является Angular velocity threshold for motor-pump transition.
Крутящий момент трения вычисляется как:
где:
и η m - механическая эффективность, который интерполируется из предоставленных пользователем табличных данных.
Tabulated data - volumetric and mechanical losses параметризацияЗначение уровня утечек определяется как:
где потеря q интерполирована из параметра Volumetric loss table, q_loss(dp,w), который основан на предоставленных пользователем данных для перепада давления, угловой скорости вала и объемного перемещения жидкости.
Крутящий момент трения на валу вычисляется как:
где потеря τ интерполирована из параметра Mechanical loss table, torque_loss(dp,w), который основан на предоставленных пользователем данных для перепада давления и угловой скорости вала.
Когда Leakage and friction parameterization установлено на Input signal - volumetric and mechanical efficienciesпорты EV и EM включены. Внутренние утечки и трение на валу вычисляются так же, как и Tabulated data - volumetric and mechanical efficiencies параметризация, за исключением того, что η v и η m получены непосредственно в портах EV и EM, соответственно.
Когда Leakage and friction parameterization установлено на Input signal - volumetric and mechanical lossesпорты LV и LM включены. Эти порты получают поток утечек и крутящий момент трения как положительные физические сигналы. Значение уровня утечек определяется как:
где:
q НН является потоком утечек, принимаемым в порту LV.
p порог является параметром Pressure drop threshold for motor-pump transition.
Крутящий момент трения вычисляется как:
где
τ LM является крутящим моментом трения, принимаемым портом LM .
ω порог является параметром Angular velocity threshold for motor-pump transition.
Объемный и механический КПД варьируются между заданными пользователем минимальным и максимальным значениями. Любые значения ниже или выше, чем эта область значений, будут иметь минимальное и максимальное заданные значения, соответственно.
Моторная скорость потока жидкости:
где
Это крутящий момент двигателя:
где
Механическая степень, извлеченная валом мотора, является:
и гидравлическая степень мотора:
Если вы хотите знать, работает ли блок за пределами предоставленных табличных данных, можно задать Check if operating beyond the quadrants of supplied tabulated data Warning чтобы получить предупреждение, если это происходит, или Error чтобы остановить симуляцию, когда это происходит. Для параметризации по входному сигналу для объемных или механических потерь, можно уведомить, если симуляция превосходит рабочие режимы с Check if operating outside of motor mode параметром.
Можно также контролировать функциональность двигателя. Установите Check if pressures are less than motor minimum pressure значение Warning чтобы получить предупреждение, если это происходит, или Error чтобы остановить симуляцию, когда это происходит.
Мотор Постоянной Производительности (TL) | Насос постоянной производительности (IL) | Мотор Переменной Производительности (IL)


